Paper:
Human Detection by Fourier Descriptors and Fuzzy Color Histograms with Fuzzy c-Means Method
Shohei Akimoto, Tomokazu Takahashi, Masato Suzuki, Yasuhiko Arai, and Seiji Aoyagi
Kansai University
3-3-35 Yamate-cho, Suita, Osaka 564-8680, Japan

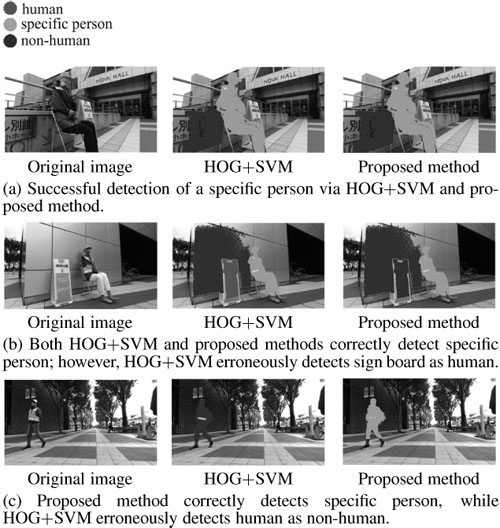
Result of specific person detection in Tsukuba Challenge
- [1] N. Dalal and B. Triggs, “Histograms of oriented gradients for human detection,” Proc. CVPR, CA, USA, pp. 886-893, 2005.
- [2] J. Satake and J. Miura, “Robust stereo-based human detection and tracking for a person following robot,” IEEE ICRA, Workshop on People Detection and Tracking, 2009.
- [3] M. Munaro et al., “Tracking people within groups with RGB-D data,” IEEE/RSJ IEEE Int. Conf. on Intelligent Robots and Systems, pp. 2101-2107, 2012.
- [4] O. M. Mozos, R. Kurazume, and T. Hasegawa, “Multi-part people detection using 2d range data,” Int. J. of Social Robotics, Vol.2, No.1, pp. 31-40, 2010.
- [5] S. Yuta, “Open Experiment of Autonomous Navigation of Mobile Robots in the City: Tsukuba Challenge 2014 and the Results (Special Issue on Real World Robot Challenge in Tsukuba: Autonomous Technology for Useful Mobile Robot),” J. of Robotics and Mechatronics, Vol.27, No.4, pp. 318-326, 2015.
- [6] K. Yamauchi et al., “Person Detection Method Based on Color Layout in Real World Robot Challenge 2013,” J. of Robotics and Mechatronics, Vol.26, No.2, pp. 151-157, 2014.
- [7] K. Hosaka et al., “A Person Detection Method Using 3D Laser Scanner: Proposal of Efficient Grouping Method of Point Cloud Data (Special Issue on Real World Robot Challenge in Tsukuba: Autonomous Technology for Useful Mobile Robot),” J. of Robotics and Mechatronics, Vol.27, No.4, pp. 374-381, 2014.
- [8] Y. Uesaka, “A new Fourier descriptor applicable to open curves,” Trans. of IEICE, Vol.67-A (Vol.3), pp. 166-173, 1984 (in Japanese).
- [9] H. Ju and K. Ma, “Fuzzy color histogram and its use in color image retrieval,” IEEE Trans. Image Process, Vol.11, No.8, pp. 994-952, 2002.
- [10] J. C. Bezdek, R. Ehrlich, and W. Full, “FCM: The fuzzy c-means clustering algorithm,” Computers & Geosciences, Vol.10, No.2, pp. 191-203, 1984.
- [11] Y. Inaura, T. Takahashi, M. Suzuki, and S. Aoyagi, “To propose a office furniture recognizing method based on general shape concept and recoginition example using a depth map,” The 30th Annual Conf. of The Robotics Society of Japan, 2J1-6, 2012 (in Japanese).
- [12] O. Hori, “Labeling,” Digital Image Processing, Tokyo: Computer Graphic Arts Society, pp. 181-182, 2004.
- [13] D. Leon et al., “Human silhouette recognition with Fourier descriptors,” Proc. of 15th Int. Conf. on Pattern Recognition, pp. 709-712, Sep. 2000.
- [14] H. Ichihashi et al., “Benchmarking parameterized fuzzy c-Means classifier,” Proc. IEEE Int. Conf. on Fuzzy System, pp. 1137-1144, Aug. 2009.
- [15] K. Uchikawa, “Categorical perception of surface color,” Kogaku, Vol.17, No.12, pp. 47-55, 1988 (in Japanese).
- [16] G. Sharma et al., “The CIEDE2000 color-difference formula: Implementation notes, supplementary test data, and mathematical observations,” Color Research & Application, Vol.30, pp. 21-30, 2004.
- [17] K. Lai et al., “A Large-Scale Hierarchical Multi-View RGB-D Object Dataset,” IEEE, Int. Conf. on Robotics and Automation (ICRA), pp. 1817-1824, 2011.
- [18] K. Takahashi, T. Takahashi, M. Suzuki, and S. Aoyagi, “Application of Kinect v2 Sensor to a Mobile Robot and Its Characterization in the Outdoor Environment (Comparison with LRF),” The Robotics and Mechatronics Conf., 2015 (in Japanese).
- [19] G. Overett et al., “A new pedestrian dataset for supervised learning,” IEEE Intelligent Vehicles Symposium, 2008.
- [20] C.-C. Chang et al., “LIBSVM: a library for support vector machines,” 2001.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.