Paper:
Development of a Small Size Underwater Robot for Observing Fisheries Resources – Underwater Robot for Assisting Abalone Fishing –
Motoki Takagi, Hayato Mori, Adiljan Yimit, Yoshihiro Hagihara, and Tasuku Miyoshi
Iwate University
4-3-5 Ueda, Morioka-city, Iwate 020-8551, Japan

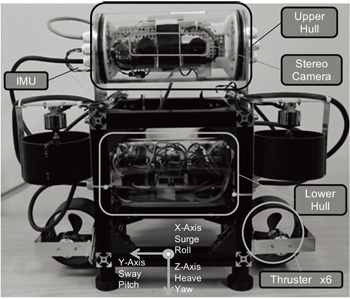
Overview of a small size underwater robot
- [1] T. Ohba, “Culture of Abalone and Japanese,” Seizando-shoten publishing Co Ltd., 2004 (in Japanese).
- [2] B. Borović and A. Vasilijević, “Potentials of Using Underwater Robotics for Fishing and Fish Farming,” Ognjen KULJAvCA2 Proc. of the 10th Int. workshop, 2011.
- [3] J. R. Mart’inez-de Dios, C. Serna, and A. Ollero, “Computer vision and robotics techniques in fish farms,” Robotica, Vol.21, No.3, pp. 233-243, 2003.
- [4] T. Maki, H. Kondo, T. Ura, Y. Nose, and T. Sakamaki, “Observation of Artificial Structures by Autonomous Underwater Vehicle,” J. of the Japan Society of Naval Architects and Ocean Engineers, Vol.1, pp. 17-26, 2005.
- [5] S. Kamio, L. Canete, and T. Takahashi, “Development of a small and modular UROV for environmental surveying – Fundamental investigation of modeling and control system –,” The Society of instrument and control engineers tohoku chapter, 292th workshop, No.292-2, 2014.
- [6] Y. Shi, W. Qian, W. Yan, and J. Li, “Adaptive Depth Control for Autonomous Underwater Vehicle Based on Feedforward Neural Networks,” Int. J. of Computer Science & Applications, Vol.4, Issue 3, pp. 107-118, 2007.
- [7] D. Maalouf, A. Chemori, and V. Creuze, “L1 Adaptive depth and pitch control of an underwater vehicle with real-time experiments,” Ocean Engineering, Vol.98, pp. 66-77, 2015.
- [8] A. Agrawal, S. Ramalingam, Y. Taguchi, and V. Chari, “A Theory of Multi-Layer Flat Refractive Geometry,” Computer Vision and Pattern Recognition (CVPR), 2012 IEEE Conf., pp. 3346-3353, 2012.
- [9] A. Sedlazeck and R. Koch, “Calibration of Housing Parameters for Underwater Stereo-Camera RigsBMVC 2011,” The 22nd British Machine Vision Conference, 2011.
- [10] E. Trucco, “Introductionary Techniques for 3-D computer Vision,” Prentice Hall PTR Upper Saddle River, 1998.
- [11] T. I. Fossen and S. I. Sagatun, “Adaptive control of nonlinear underwater robotic systems,” Modeling Identification and Control J., Vol.12, No.2, pp. 95-105, 1991.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.