Development Report:
Prototyping Force-Controlled 3-DOF Hydraulic Arms for Humanoid Robots
Kensuke Izawa and Sang-Ho Hyon
College of Science and Engineering, Ritsumeikan University
1-1-1 Nojihigashi, Kusatsu-shi, Shiga 525-8577, Japan

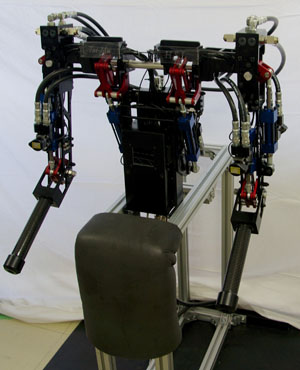
Hydraulic dual arm robot prototype
- [1] S. Hyon, T. Yoneda, and D. Suewaka, “Lightweight hydraulic leg to explore agile legged locomotion,” IEEE/RSJ IROS, pp. 4655-4660, 2013.
- [2] D. Suewaka, T. Yoneda, K. Takahashi, and S. Hyon, “Design of a fast and lightweight hydraulic biped walking robot,” RSJ 2013, AC1C1-04, 2013.
- [3] M. Maeda and T. Miki, “Role of arm action in sprinting,” Reserch Quarterly for Athletics, Vol.80, pp. 13-19, 2010.
- [4] M. Fuchs, C. Borst, P. Robuffo Giordano, A. Baumann, E. Kraemer, J. Langwald, R. Gruber, N. Seitz, G. Plank, K. Kunze, R. Burger, F. Schmidt, T. Wimboeck, and G. Hirzinger, “Rollin’ justin – design considerations and realization of a mobile platform for a humanoid upper body,” IEEE ICRA, pp. 4131-4137, 2009.
- [5] C. Ott, O. Eiberger, W. Friedl, B. Bauml, U. Hillenbrand, C. Borst, A. Albu-Schaffer, B. Brunner, H. Hirschmuller, S. Kielhofer, R. Konietschke, M. Suppa, T. Wimbock, F. Zacharias, and G. Hirzinger, “A Humanoid Two-Arm System for Dexterous Manipulation,” IEEE/RAS ICHR, pp. 276-283, 2006.
- [6] “DLR Light Weight Root III,” Institute of Robotics and Mechatronics, German Aerospace Center, 2003.
- [7] “New Generation Robots MOTOMAN SDA, SIA Series,” Yaskawa Electric Corporation, 2012.
- [8] Y. Ito, T. Nakaoka, J. Urata, K. Kobayashi, S. Nozawa, Y. Nakanishi, K. Okada, and M. Inaba, “Development and Verification of Life-Size Humanoid with High-Output Actuation System,” IEEE ICRA, pp. 3433-3438, 2014.
- [9] G. Cheng, S. Hyon, J. Morimoto, A. Ude, J. G. Hale, G. Colvin, W. Scroggin, and S. C. Jacobsen, “CB: A Humanoid Research Platform for Exploring NeuroScience,” Advanced Robotics, Vol.21, No.10, pp. 1097-1114, 2007.
- [10] H. Takahashi, T. Kazama, and J. Oga, “Hydraulic Double-Arm Robot,” TOSHIBA REVIEW, Vol.69, No.5, 2014.
- [11] S. Hyon, J. Moren, and G. Cheng, “Humanoid batting with bipedal balancing,” IEEE/RAS ICHR, pp. 493-499, 2008.
- [12] T. Baba, Y. Wada, and A. Ito, “Muscular activity pattern during sprint running,” Physical Education Studies, Vol.45, pp. 186-200, 2000.
- [13] H. Merrit, “Hydraulic Control Systems,” Wiley, 1967.
- [14] H. K. Khalil, “Nonlinear Systems,” 2nd ed, Prentice Hall, 1996.
- [15] S. Hyon, “A motor control strategy with virtual musculoskeletal systems for compliant anthropomorphic robots,” IEEE/ASME Trans. on Mechatronics, Vol.14, Issue 6, pp. 677-688, 2009.
- [16] S. Hyon, J. G. Hale, and G. Cheng, “Full-body compliant human-humanoid interaction: Balancing in the presence of unknown external forces,” IEEE Trans. on Robotics, Vol.23, No.5, pp. 884-898, 2007.
- [17] S. Arimoto, M. Sekimoto, H. Hashiguchi, and R. Ozawa, “Natural resolution of ill-posedness of inverse kinematics for redundant robots: a challenge to bernstein’s degrees-of-freedom problem,” Advanced Robotics, Vol.19, No.4, pp. 401-434, 2005.
- [18] A. Albu-Schaffer, C. Ott, and G. Hirzinger, “A Unified Passivity-based Control Framework for Position, Torque and Impedance Control of Flexible Joint Robots,” The Int. J. of Robotics Research, Vol.26, No.1, pp. 23-39, 2007.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.