Development Report:
Mobility Support System for Personal Mobility Vehicles
Taro Fujikawa*, Makiko Ishikawa**, and Shuro Nakajima***
*Department of Robotics and Mechatronics, School of Science and Technology for Future Life, Tokyo Denki University
5 Senju Asahi-cho, Adachi-ku, Tokyo 120-8551, Japan
**Department of Modern Mechanical Engineering, School of Creative Science and Engineering, Waseda University
27 Waseda-chyo, Shinjuku-ku, Tokyo 162-0042, Japan
***Faculty of Systems Engineering, Wakayama University
930 Sakaedani, Wakayama-city 640-8510, Japan

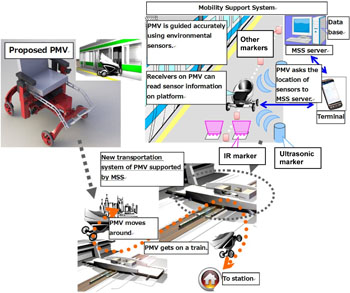 Transportation system of PMVs by MSS
Transportation system of PMVs by MSS- [1] S. Nakajima and T. Fujikawa, “Proposal for Personal Mobility Vehicle Supported by Mobility Support System,” Proc. of 2012 IEEE Int. Electric Vehicle Conf., 2012.
- [2] T. Sato, N. Matsuhira, and E. Oyama, “Development of Common Platform Technology for Next-Generation Robots,” Advances in Service Robotics, pp. 161-180, 2008.
- [3] M. Ishikawa, T. Fujikawa, and S. Nakajima, “Indoor Driving Support System for Personal Mobility Vehicle Driving in the Public Facilities,” 2013 RISP Int. Workshop on Nonlinear Circuits, Communications and Signal Processing, pp. 25-28, 2013.
- [4] T. Fujikawa and S. Nakajima, “Proposal for An IR System to Support Automatic Control for A Personal Mobility Vehicle,” Proc. of the 2012 IEEE Int. Conf. on Robotics and Biomimetics, pp. 2207-2212, 2012.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.