Paper:
Study on Presentation System for Walking Training Using High-Performance Shoes
Yasuhiro Hayakawa*1, Shogo Kawanaka*2, Kazuma Kanezaki*3, Kosei Minami*4, and Shigeki Doi*5
*1Department of Control Engineering, National Institute of Technology, Nara College
22 Yata-cho, Yamatokoriyama-shi, Nara 639-1080, Japan
*2Advanced Mechanical Engineering Course, National Institute of Technology, Nara College
22 Yata-cho, Yamatokoriyama-shi, Nara 639-1080, Japan
*3Interdisciplinary Graduate School of Science and Engineering, Tokyo Institute of Technology
4259 Nagatsuta-cho, Midori-ku, Yokohama-shi, Kanagawa 226-8503, Japan
*4Department of Mechanical Technology, Saitama University
255 Shimo-Okubo, Sakura-ku, Saitama-shi, Saitama 338-8570, Japan
*5Department of Electrical Engineering, National Institute of Technology, Nara College
22 Yata-cho, Yamatokoriyama-shi, Nara 639-1080, Japan

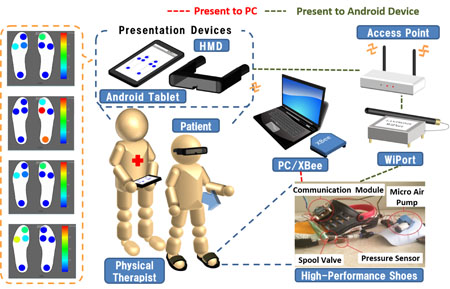 Proposed walking training system
Proposed walking training system- [1] Cabinet office, Government of Japan, Director General for Policies on Cohesive Society, “H.26 Aged Society White Paper,” Chapter 1, Section 1-2, 2014.
- [2] Ministry of Health, Labour and Welfare, “Comprehensive Survey of Living Conditions,” IV contitions of care, 2015.
- [3] T. Takashima, “Study of the dynamic model analysis of the human foot complex during gait and its applications,” Waseda Univercity, pp. 40-41, 2003.
- [4] T. Ikehara, E. Tanaka, T. Tamiya, and N. Fukaya, “Development of elderly people’s walking support system,” Robotics and Mechatronics Conf. 2006, No.06-4, 1P1-A09, 2006.
- [5] E. Tanaka, T. Ikehara, H. Yusa, Y. Sato, T. Sakurai, S. Saegusa, K. Ito, and L. Yuge, “Walking-Assistance Apparatus as a Next-Generation Vehicle and Movable Neuro-Rehabilitation Training Appliance,” J. of Robotics and Mechatronics, Vol.24, No.5, 2012.
- [6] H. Kobayashi, T. Hashimoto, S. Nakayama, and K. Irie, “Development of an Active Walker and its Effect,” J. of Robotics and Mechatronics, Vol.24, No.2, 2012.
- [7] H. Inoue and T. Noritsugu, “Development of Walking Assist Machine Using Linkage Mechanism – Mechanism and its Fundamental Motion –,” J. of Robotics and Mechatronics, Vol.22, No.2, 2010.
- [8] M. Sato, E. Yagi, and K. Sano, “Power Assist Control Calculated by a Human Model and Joint Angles for Walking Motion Using Pneumatic Actuators,” J. of Robotics and Mechatronics, Vol.25, No.6, 2013.
- [9] Y. Hayakawa, K. Morishita, M. Aichi, and R. Tiiuda, “Development of a Pneumatic Silicon Outer Fence Mold Actuator,” The Japan Society of Mechanical Engineers, C, Vol.70, No.690, pp. 433-439, 2004.
- [10] P. Jacqueline, “GAIT ANALYSIS Normal and Pathological Function second Edition,” pp. 2-47, 2007.
- [11] Y. Hayakawa, S. Kawanaka, K. Kanezaki, and S. Doi, “Development of Walking Training System using High-Performance Shoes,” Robotics and Mechatronics Conf. 2014, 1A1-A01, 2014.
- [12] Y. Hayakawa, S. Kawanaka, K. Kanezaki, and S. Doi, “Study on Presentation System for Walking Training using High-Performance Shoes,” Robotics and Mechatronics Conf. 2015, 1P2-L10, 2015.
- [13] K. Kanezaki, Y. Hayakawa, S. Kawanaka, D. Shibata, and S. Doi, “Development of Walking Training Teaching System by using High-Performance Shoes,” Bioengineering Conf. 2015, No.14-67, 2G11, 2015.
- [14] T. Arai and Y. Shiba, “The Relationship Between the Stride Time Variability, Motor Ability and Fall in Community -Dwelling Elderly People,” Physicotherapeutics, Vol.38, No.3, pp. 165-172, 2011.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.