Paper:
Integrated Autonomous Navigation System and Automatic Large Scale Three Dimensional Map Construction
Yusuke Fujino, Kentaro Kiuchi, Shogo Shimizu, Takayuki Yokota, and Yoji Kuroda
Department of Mechanical Engineering, Meiji University
1-1-1 Higashimita, Tama-ku, Kawasaki 214-8571, Japan

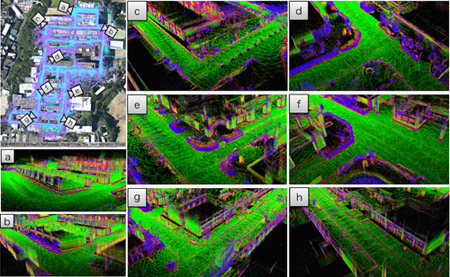 Constructed large-scale 3D map
Constructed large-scale 3D map- [1] N. Akai, K. Inoue, and K. Ozaki, “Autonomous navigation based on magnetic and geometric landmarks on environmental structure in real world,” J. of Robotics and Mechatronics, Vol.26, No.2, pp. 158-165, 2014.
- [2] J. Eguchi and K. Ozaki, “Development of the Autonomous Mobile Robot for Target-Searching in Urban Areas in the Tsukuba Challenge 2013,” J. of Robotics and Mechatronics, Vol.26, No.2, pp. 166-176, 2014.
- [3] T. Shioya, K. Kogure, and N. Ohta, “Minimal Autonomous Mover: MG-11 for Tsukuba Challenge,” J. of Robotics and Mechatronics, Vol.26, No.2, pp. 225-235, 2014.
- [4] L. Gomes, “Hidden Obstacles for Google’s Self-Driving Cars,” MIT Technology Review, August 28, 2014.
- [5] Q. V. Le, “Building high-level features using large scale unsupervised learning,” Acoustics, 2013.
- [6] T. Yokota et al., “Development of the Versatile Autonomous Navigation System,” The 15th SICE System Integration, Tokyo, 2014 (in Japanese).
- [7] S. Shimizu and Y. Kuroda, “High-Speed Registration of Point Clouds by using Dominant Planes,” The 19th Robotics Symposia, pp. 453-458, 2014 (in Japanese).
- [8] C.-C. Chang and C.-J. Lin, “LIBSVM: a library for support vector machines,” ACM Trans. on Intelligent Systems and Technology, 2011.
- [9] S. Thrun et al., “Stanley: The robot that won the DARPA Grand Challenge,” Proc. of the JFR, Vol.23, No.9, pp. 661-692, 2006.
- [10] F. Neuhaus et al., “Terrain drivability analysis in 3D laser range data for autonomous robot navigation in unstructured environments,” Emerging Technologies and Factory Automation (ETFA), pp. 1-4, 2009.
- [11] S. Koenig and M. Likhachev, “D* Lite,” Proc. of the AAAI, pp. 476-483, 2003.
- [12] D. Ferguson, T. M. Howard, and M. Likhachev, “Motion planning in urban environments,” Proc. of the JFR, Vol.25, pp. 939-960, 2008.
- [13] . Yokota and Y.Kuroda, “LIDAR-based Human Recognition using Shape Features,” The Robotics and Mechatronics Conf. 2014, 3P1-K04, 2014 (in Japanese).
- [14] R. Kummerle, G. Grisetti, H. Strasdat, K. Konolige, and W. Burgard, “g2o: A general framework for graph optimization,” pp. 3607-3613, 2011.
- [15] G. Grisetti, R. Kummerle, and C. Stachniss, “A tutorial on graph-based SLAM,” IEEE Intelligent Transportation Systems Magazine, Vol.2, pp. 31-43, 2010.
- [16] S. Rusinkiewicz and M. Levoy, “Efficient variants of the ICP algorithm,” Proc. of the Int. Conf. on 3-D Digital Imaging and Modeling (3DIM), pp. 145-152, 2001.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.