Paper:
New Lane Detection Algorithm that Emulates Human Color Recognition
Hideyuki Saito, Kazuyuki Kobayashi, Kajiro Watanabe, and Tetsuo Kinoshita
Graduate School of Science and Engineering, Hosei University
3-7-2 Kajino-cho, Koganei, Tokyo 184-8584, Japan

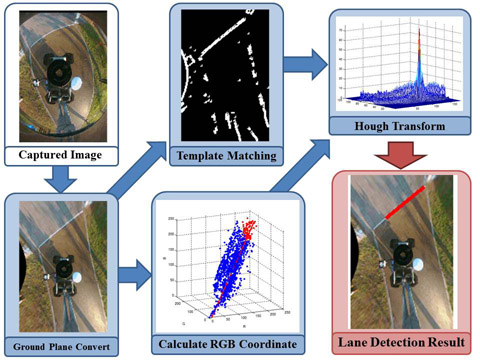 New lane detection algorithm
New lane detection algorithm- [1] K. Yamamoto, T. Okubo, Y. Ono, and Y. Hara, “Examples of Activities in the Background of the Field Test “Tsukuba Challenge” and Autonomous Mobile Technologies to Finish the Test,” Information Processing Society of Japan, Vol.52, No.9, pp. 1166-1172, 2011(In Japanese).
- [2] E. H. Adelson, “Perceptual Organization and the Judgment of Brightness,” Science, Vol.262, pp. 2042-2044, 1993.
- [3] B. A. Wandell, “Foundations of Vision,” Sinauer, 1995.
- [4] J. K. Bowmaker and H. J. Dartnall, “Visual pigments of rods and cones in a human retina,” The J. of physiology, Vol.298, No.1, pp. 501-511, 1980.
- [5] E. H. Land, “The retinex theory of color vision,” J. Opt. Soc. Am., Vol.61, pp. 1-11, 1977.
- [6] R. S. Woodworth and R. Schlosberg, “Experimental Psychology,” Holt, Rinehard and Winston, 1954.
- [7] L. T. Maloney, “Physics-based approaches to modeling surface color perception,” Color vision: From genes to perception, pp. 387-416, 1999.
- [8] K. Devlin, “A review of tone reproduction techniques,” Technical Report, CSTR-02-005, Department of Computer Science, University of Bristol, 2002.
- [9] K. Kobayashi, K. Watanabe, T. Ohkubo, and Y. Kurihara, “A Lane Detection Algorithm for Personal Vehicles,” Electrical Engineering in Japan, Vol.177, No.4, pp. 23-32, 2011.
- [10] M. Amemiya, K. Ishikawa, K. Kobayashi, and K. Watanabe, “Lane detection for intelligent vehicle employing omni-directional camera,” SICE 2004 Annual Conf., Vol.3, pp. 2166-2170, 2004.
- [11] A. Matsumoto, S. Tsukuda, and G. Yoshita, “Navigation of an Omnidirectional Mobile Robot by Teaching a Few Omnidirectional Images,” J. of Robotics and Mechatronics, Vol.16, No.1, pp. 80-89, 2004.
- [12] M. Kristou, A. Ohya, and S. Yuta, “Target Person Identification and Following Based on Omnidirectional Camera and LRF Sensor Fusion from a Moving Robot,” J. of Robotics and Mechatronics, Vol.23, No.1, pp. 163-172, 2011.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.