Paper:
Development of Mobile Robot “SARA” that Completed Mission in Real World Robot Challenge 2014
Naoki Akai*, Kenji Yamauchi*, Kazumichi Inoue**, Yasunari Kakigi*, Yuki Abe*, and Koichi Ozaki*
*Graduate School of Engineering, Utsunomiya University
7-1-2 Yoto, Utsunomiya-shi, Tochigi 321-8585, Japan
**AIM Co., Ltd.
2333 Yana, Oyama-shi, Tochigi 323-0158, Japan

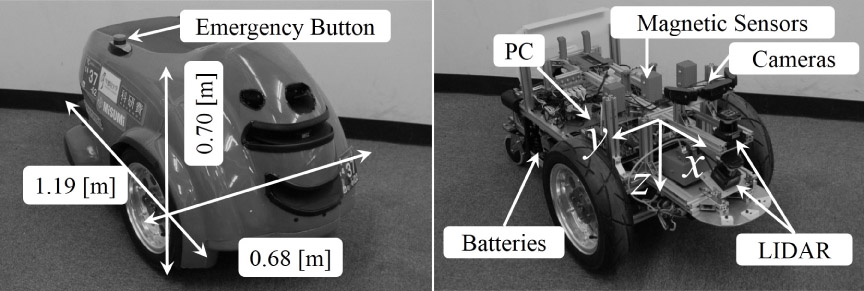
View of SARA with and without cowl
- [1] K. Nagatani et al., “Sensor information processing in robot competitions and real world robot challenges,” Advanced Robotics, Vol.26, No.14, pp. 1539-1554, 2012.
- [2] N. Akai et al., “Autonomous navigation based on magnetic and geometric landmarks on environmental structure in real world,” J. of Robotics and Mechatronics, Vol.26, No.2, pp. 158-165, 2014.
- [3] K. Yamauchi et al., “Person detection method based on color layout in real world robot challenge 2013,” J. of Robotics and Mechatronics, Vol.26, No.2, pp. 151-157, 2014.
- [4] K. Inoue et al., “Proposal and consideration of design policy for autonomous mobile robots in real world robot challenge,” J. of the Robotics Society of Japan, Vol.30, No.3, pp. 234-244, 2012 (in Japanese).
- [5] N. Akai et al., “Implementation of magnetic navigation method based on experimental analysis of magnetic field,” J. of the Robotics Society of Japan, Vol.32, No.4, pp. 395-402, 2014 (in Japanese).
- [6] T. Yoshida et al., “A sensor platform for outdoor navigation using gyro-assisted odometry and roundly-swinging 3D laser scanner,” Int. Conf. on Intelligent Robots and Systems, pp. 1414-1420, 2010.
- [7] T. Suzuki et al., “Autonomous navigation of a mobile robot based on GNSS/DR integration in outdoor environments,” J. of Robotics and Mechatronics, Vol.26, No.2, pp. 214-224, 2014.
- [8] M. Tomono et al., “Analysis and design of outdoor navigation system at the Tsukuba challenge,” J. of the Robotics Society of Japan, Vol.30, No.3, pp. 262-270 (in Japanese).
- [9] S. A. Rahok et al., “Navigation using an environmental magnetic field for outdoor autonomous mobile robots,” Advanced Robotics, Vol.26, Nos.3-4, pp. 1751-1771, 2011.
- [10] N. Akai et al., “Monte Carlo localization using magnetic sensor and LIDAR for real world navigation,” Int. Symp. on System Integration, pp. 682-687, 2013.
- [11] F. Dellaert et al., “Monte Carlo localization for mobile robots,” Int. Conf. on Robotics and Automation, Vol.2, pp. 1322-1328, 1999.
- [12] K. Yamazaki et al., “Analysis of magnetic disturbance due to buildings,” IEEE Trans. on Magnetics Vol.25, pp. 4006-4008, 1989.
- [13] A. Doucet et al., “Sequential Monte Carlo Methods in Practice,” Springer, 2001.
- [14] M. Yokozuka et al., “Robotic wheelchair with autonomous traveling capability for transportation assistance in an urban environment.” Int. Conf. on Intelligent Robots and Systems, pp. 2234-2241, 2012.
- [15] O. Khatib, “Real-time obstacle avoidance for manipulators and mobile robots,” Int. Conf. on Robotics and Automation, Vol.2, pp. 500-505, 1985.
- [16] D. Fox et al., “The dynamic window approach to collision avoidance,” IEEE Robotics and Automation, Vol.4, No.1, 1997.
- [17] M. Yokozuka et al., “A reasonable path planning via path energy minimization,” J. of Robotics and Mechatronics, Vol.26, No.2, pp. 236-244, 2014.
- [18] M. Bertozzi et al., “Pedestrian detection in infrared images,” Proc. of the IEEE Intelligent Vehicles Symposium, pp. 662-667, 2003.
- [19] N. Dalal et al., “Histogram of oriented gradients for human detection,” Computer Society Conf. on Computer Vision and Pattern Recognition, Vol.1, pp. 886-893, 2005.
- [20] J. Eguchi et al., “Development of the autonomous mobile robot for target-searching in urban areas in the Tsukuba Challenge 2013,” J. of Robotics and Mechatronics, Vol.26, No.2, pp. 166-176, 2014.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.