Paper:
Linear Quadratic Optimal Regulator for Steady State Drifting of Rear Wheel Drive Vehicle
Ronnapee Chaichaowarat and Witaya Wannasuphoprasit†
Department of Mechanical Engineering, Chulalongkorn University
254 Phayathai Road, Wangmai, Pathumwan, Bangkok 10330, Thailand
†Corresponding author

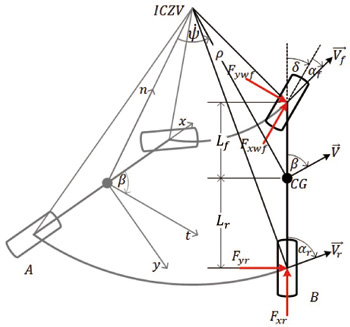
Single-track vehicle drifting
- [1] N. Wada, A. Takahashi, M. Saeki, and M. Nishimura, “Vehicle yaw control using an active front steering system with measurements of lateral tire force,” J. of Robotics and Mechatronics, Vol.23, No.1, pp. 83-93, 2011.
- [2] T. D. Gillespie, “Fundamentals of Vehicle Dynamics,” SAE Int., PA, USA, 1992.
- [3] E. Velenis and P. Tsiotras, “Minimum time vs maximum exit velocity path optimization during cornering,” the IEEE Int. Symposium on Industrial Electronics, 2005.
- [4] E. Velenis, P. Tsiotras, and J. Lu, “Modeling aggressive maneuvers on loose surfaces: data analysis and input parameterization,” the Mediterranean Conf. on Control and Automation, 2007.
- [5] E. Velenis, P. Tsiotras, and J. Lu, “Modeling aggressive maneuvers on loose surfaces: the cases of trail-braking and pendulum-turn,” the European Control Conf., 2007.
- [6] M. Abdulrahim, “On the dynamics of automobile drifting,” SAE Technical Paper, No.2006-01-1019, 2006.
- [7] E. Velenis, E. Frazzoli, and P. Tsiotras, “On steady-state cornering equilibria for wheeled vehicles with drift,” the 48th IEEE Conf. on Decision and Control, pp. 3545-3550, 2009.
- [8] E. Bakker, L. Nyborg, and H. B. Pacejka, “Tyre modeling for use in vehicle dynamics studies,” SAE Technical Paper, No.870421, 1987.
- [9] E. Velenis, D. Katzourakis, E. Frazolli, P. Tsiotras, and R. Happee, “Stabilization of steady-state drifting for a RWD vehicle,” the 10th Int. Symposium on Advanced Vehicle Control, 2010.
- [10] E. Velenis, D. Katzourakis, E. Frazolli, P. Tsiotras, and R. Happee, “Steady-state drifting stabilization of RWD vehicles,” Control Engineering Practice, Vol.10, No.11, pp. 1363-1376, 2011.
- [11] R. Chaichaowarat and W. Wannasuphoprasit, “Two dimensional dynamic model of drifting vehicle,” the 7th TSAE Int. Conf. on Automotive Engineering, 2011.
- [12] R. Chaichaowarat and W. Wannasuphoprasit, “Dynamics and simulation of RWD vehicle drifting at steady state using BNP-MNC tire model,” SAE Technical Paper, No.2013-01-0001, 2013.
- [13] R. Chaichaowarat and W. Wannasuphoprasit, “Optimal control for steady state drifting of RWD vehicle,” Proc. of the 7th IFAC Symposium of Advances in Automotive Control, pp. 824-830, 2013.
- [14] H. T. Szostak, W. R. Allen, and T. J. Rosenthal, “Analytical modeling of driver response in crash avoidance maneuvering. volume II: an interactive model for driver/vehicle simulation,” U.S. Department of Transportation Report, NHTSA DOT HS-807-271, 1988.
- [15] R. Branch and M. Branch, “The tire-force ellipse (friction ellipse) and tire characteristics,” SAE Technical Paper, No.2011-01-0094, 2011.
- [16] V. T. Nicolas and T. R. Comstock, “Predicting directional behavior of tractor semitrailers when wheel anti-skid brake systems are used,” ASME Paper, No.72 - WA/AUT-16, 1972.
- [17] M. Tanaka, H. Ohtake, and K. Tanaka, “A simple, natural and effective framework of nonlinear systems control and its application to aerial robot,” J. of Robotics and Mechatronics, Vol.26, No.2, pp. 140-147, 2014.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.