Paper:
Recognition of Center Circles for Encoded Targets in Digital Close-Range Industrial Photogrammetry
Huang Xuemei, Su Xinyong, and Liu Weihong
College of Mechanical Engineering, Shandong University of Technology
No.12 Zhangzhou Road, Zhangdian district, Zibo city, Shandong province 255049, China

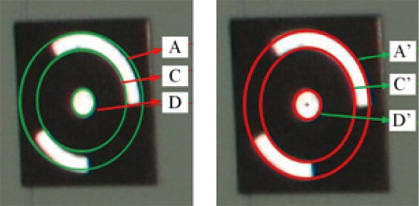 Final position of center circles
Final position of center circles- [1] R. B. Xia, J. B. Zhao, W. J. Liu, J. H. Wu, S. P. Fu, J. Jiang et al., “A robust recognition algorithm for encoded targets in close-range photogrammetry,” J. of Information Science and Engineering, Vol.8, No.2, pp. 407-418, 2012.
- [2] E. M. Mikhail, M. L. Akey, and O. R. Mitchell, “Detection and sub-pixel location of photogrammetric targets in digital images,” Pattern Recognit in Photogramm, Sel Pap of the Spec Workshop, Vol.39, No.3, pp. 63-83, Graz, Austria, September 1983.
- [3] S. J. Ahn and W. Rauh, “Circular coded targets for automation of optical 3D-measurement and camera calibration,” Int. J. of Pattern Recognition and Artificial Intelligence, Vol.15, No.6, pp. 905-919, 2001.
- [4] T. Tasaki, S. Tokura, T. Sonoura, F. Ozaki, and N. Matsuhira, “Obstacle location classification and self-localization by using a mobile omnidirectional camera based on tracked floor boundary points and tracked scale-rotation invariant feature points,” J. of Robotics and Mechatronics, Vol.23, No.6, pp. 1012-1013, 2011.
- [5] C. Wang, M. Dong, N. Lv, and L. Zhu, “New encoded Method of measurement targets and its recognition algorithm,” Tool Technology, Vol.17, No.4, pp. 26-30, 2002.
- [6] M. Xia and B. Liu, “Image registration by super curves,” IEEE Trans. on Image Processing, Vol.13, No.5, pp. 72-81, April 2004.
- [7] X. J. Zheng, J. J. Wang, and C. Zuo, “Geometric feature based information process of marks in photogrammetry,” Test and Measurement Technology. Vol.34, No.5, pp. 49-52, 2007.
- [8] Z. P. Chen, David T. W. Chan, Z. L. Ye, and G. H. Peng, “Target recognition based on mathematical morphology,” Proc. of 2007 10th IEEE Int. Conf. on Computer Aided Design and Computer Graphics, Beijing, China, pp. 457-460, October 2007.
- [9] H. W. Chen, V. Chris, T. Michael, and S. Steve, “Robust extended target detection using non-linear morphological operations,” Proc. of SPIE – The Int. Society for Optical Engineering, Orlando, FL, United states, Vol.7694, pp. 452-462, April 2010.
- [10] F. Mina, M. Ali, and A. M. Reza, “Detection of small target based on morphological filters,” ICEE2012 – 20th Iranian Conf. on Electrical Engineering, Tehran, Iran, pp. 1097-1101, May 2012.
- [11] F. A. Tsai and H. A. Chang, “Detection of vanishing points using Hough transform for single view 3D reconstruction,” 34th Asian Conf. on Remote Sensing, Vol.2, pp. 1182-1189, October 2013.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.