Paper:
Convenient Position Estimation of Distributed Sensors in Intelligent Spaces Using SLAM for Mobile Robots
Fumitaka Hashikawa* and Kazuyuki Morioka**
*Department of Electrical Engineering, Meiji University
1-1-1 Higashimita, Tama-ku, Kawasaki 214-8571, Japan
**Department of Network Design, Meiji University
4-21-1 Nakano Nakano, Tokyo 164-8525, Japan

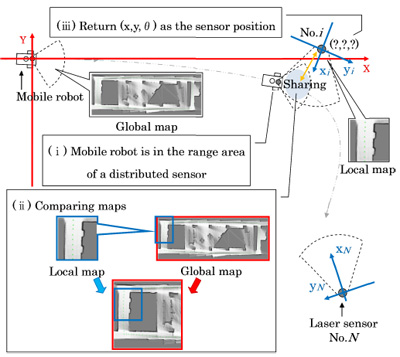
Overview of the proposed method
- [1] J. Lee and H. Hashimoto, “Intelligent Space – concept and contents,” Advanced Robotics, Vol.16, No.3, pp. 265-280, 2002.
- [2] Y. Nishida, T. Hori, T. Suehiro, and S. Hirai, “Sensorized environment for self-communication based on observation of daily human behavior,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 1364-1372, 2000.
- [3] T. Sato, T. Harada, and T. Mori, “Environment-Type Robot System “Robotic Room” Featured by Behavior Media, Behaviour Contents, and Behavior Adaptation,” IEEE/ASME Trans. on Mechatronics, Vol.9, No.3, pp. 529-534, 2004.
- [4] T. Sasaki, Y. Toshima, and H. Hashimoto, “Design and Implementation of Basic Framework for Integration of Robot Technology Elements in Intelligent Space,” J. of Robotics and Mechatronics, Vol.23, No.4, 2011.
- [5] T. Jin, P. Podrzaj, and H. Hashimoto, “Position Uncertainty Reduction of Mobile Robot Based on DINDs in Intelligent Space,” IEEE Int. Symposium on Industrial Electronics, Vol.4, pp. 2603-2607, 2006.
- [6] D. Herrero and H. Martinez, “Fuzzy Mobile-Robot Positioning in Intelligent Spaces Using Wireless Sensor Networks,” Sensors, Vol.11, No.11, pp. 10820-10839, 2011.
- [7] J. Lee, K. Morioka and H. Hashimoto, “Mobile Robot Control in Intelligent Space for People Support,” J. of Robotics and Mechatronics, Vol.14, No.4, 2002.
- [8] K. Morioka, J. Lee, and H. Hashimoto, “Human-following mobile robot in a distributed intelligent sensor network,” IEEE Trans. on Industrial Electronics, Vol.51, No.1, pp. 229-237, 2004.
- [9] T. Sasaki and H. Hashimoto, “Auto-Calibration of Distributed Laser Range Finders Based on Object Tracking,” The 25th Annual Conf. of the Robotics Society of Japan, 1C21(1)-1C21(3), 2007.
- [10] T. Sasaki and H. Hashimoto, “Calibration of Distributed Laser Range Finders using Mobile Robots,” ROMOBEC2007, 2A2-K01, 2007.
- [11] S. Funiak, C. Guestrin, M. Paskin, and R. Sukthankar, “Distributed Localization of Networked Cameras,” The Fifth Int. Conf. on, Information Processing in Sensor Networks, pp. 34-42, 2006.
- [12] C. Taylor, A. Rahimi, and J. Bachrach, “Simultaneous Localization, Calibration, and Tracking in an ad Hoc Sensor Network,” The Fifth Int. Conf. on, Information Processing in Sensor Networks, pp. 27-33, 2006.
- [13] S. Thrun, W. Burgard, and D. Fox, “Probabilistic Robotics,” Massachusetts Institute of Technology, pp. 1-483, 2007.
- [14] Y. Kasuya, F. Hashikawa, and K. Morioka, “An assistance system for construction of intelligent spaces based on the flexible communication among distributed sensors and mobile robots,” SICE System Integration (SICE SI 2014), pp. 514-517, 2014.
- [15] F. Lu and E. Milios, “Robot Pose Estimation in Unknown Environments by matching 2D Range Scans,” J. of Intelligent and Robotic Systems, Vol.18, pp. 249-275, 1997.
- [16] S. Yamanaka and K. Morioka, “Mobile Robot Navigation Using Hybrid Simplified Map with Relationships between Places and Grid Maps,” 10th IFAC Symposium on Robot Control, pp. 616-621, 2012.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.