Development Report:
Fast and Robust Vision System for Shogi Robot
Gou Koutaki and Keiichi Uchimura
Kumamoto University
2-39-1 Kurokami, Kumamoto 860-8555, Japan

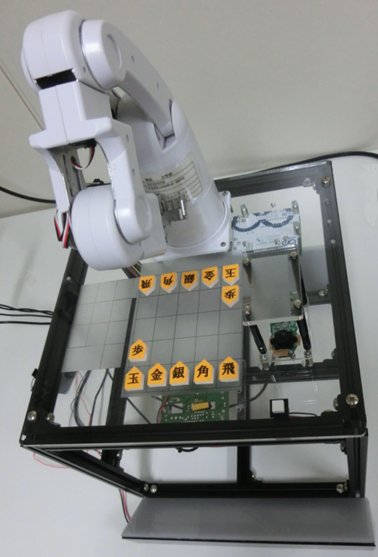
Developed shogi robot system
- [1] Japan Productivity Center, Leisure Research 2011.
- [2] T. Kurita, M. Miwa, and T. Chikayama, “Automatic position recognition method using image information in shogi,” IPSJ Game Programming Workshop’07, 2007.
- [3] T. Takayanagi and M. Takahashi, “Automatic Generation System of Shogi Record Using a Camera Set Obliquely Upward,” Proc. of the 2009 IEICE Society Conf., 2009.
- [4] F. Groen, G. Boer, A. Inge, and R. Stam, “A chess playing robot: lab course in robot sensor integration,” Proc. of IEEE Instrumentation and Measurement Technology Conf., pp. 261-264, 1992.
- [5] D. Urting and Y. Berbers, “MarineBlue: A Low-Cost Chess Robot,” Proc. of the IASTED Int. Conf. on Robotics and Applications, pp. 76-81, 2003
- [6] A. Reinefeld, “An Improvement to the Scout Tree-Search Algorithm,” ICCA J., Vol.6, No.4, pp. 4-14, 1983.
- [7] H. Kaindl, “Dynamic Control of the Quiescence Search in Computer Chess,” Cybernetics and Systems Research, pp. 973-977, 1982.
- [8] D. I. Barnea and H. F. Silverman, “A class of algorithms for fast digital image registration,” IEEE Trans. Comput., pp. 179-186, 1972.
- [9] J. Fairbairn, “Shogi for Beginners,” 1984.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.