Paper:
Stable Position and Pose Estimation of Industrial Parts Using Evaluation of Observability of 3D Vector Pairs
Shuichi Akizuki and Manabu Hashimoto
Graduate School of Information Science and Technology, Chukyo University
101-2 Yagoto Honmachi, Showa-ku, Nagoya, Aichi 466-8666, Japan

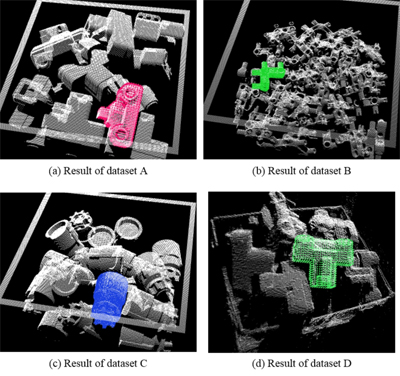 Recognition results
Recognition results- [1] H. Chen and B. Bhanu, “3D Free-form Object Recognition in Range Images using Local Surface Patches,” J. Pattern Recognition Letters, Vol.28, Issue 10, pp. 1252-1262, 2007.
- [2] T. Takeguchi and S. Kaneko, “Depth Aspect Images for Robust Object Recognition,” Proc. SPIE Conf. on Optomechatronic Systems IV, Vol.5264, pp. 54-65, 2003.
- [3] C. Dorai and A. K. Jain, “COSMOS-A Representation Scheme for 3D Free-Form Objects,” Trans. on IEEE Pattern Analysis and Machine Intelligence, Vol.19, Issue 10, pp. 1115-1130, 1997.
- [4] R. B. Rusu, N. Blodow, Z. C. Marton, and M. Beetz, “Aligning Point Cloud Views using Persistent Feature Histograms,” Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 3384-3391, 2008.
- [5] R. B. Rusu, N. Blodow, and M. Beetz, “Fast Point Feature Histograms (FPFH) for 3D Registration,” Proc. IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3212-3217, 2009.
- [6] F. Tombari, S. Salti, and L. Di Stefano, “Unique Signatures of Histograms for Local Surface Description,” Proc. 11th European Conf. on Computer Vision (ECCV), pp. 356-369, 2010.
- [7] S. Winkelbach, S. Molkenstruck, and F. M. Wahl, “Low-Cost Laser Range Scanner and Fast Surface Registration Approach,” Proc. 28th DAGM Symposium, pp. 718-728, 2006.
- [8] B. Drost, M. Ulrich, N. Navab, and S. Ilic, “Model Globally, Match Locally: Efficient and Robust 3D Object Recognition,” Proc. IEEE Computer Vision and Pattern Recognition (CVPR), pp. 998-1005, 2010.
- [9] C. Choi, Y. Taguchi, O. Tuzel, M. Liu, and S. Ramalingam, “Voting-based Pose Estimation for Robotic Assembly using a 3D Sensor,” Proc. IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 1724-1731, 2012.
- [10] S. Akizuki and M. Hashimoto, “Fast and Reliable 3-D Object Recognition based on Surface Normal Distributions,” Proc. Int. Symposium on Optomechatronic Technologies (ISOT), pp. 1-9, 2013.
- [11] Y. Guo, F. Sohel, M. Bennamoun, M. Lu, and J. Wan, “Rotational Projection Statistics for 3D Local Surface Description and Object Recognition,” Int. J. of Computer Vision (IJCV), Vol.105, Issue 1, pp. 63-86, 2013.
- [12] F. Tombari and L. Di Stefano, “Object recognition in 3D scenes with occlusions and clutter by Hough voting,” Proc. Fourth Pacific-Rim Symposium on Image and Video Technology, pp. 349-355, 2010.
- [13] R. B. Rusu and S. Cousins, “3D is Here: Point Cloud Library (PCL),” Proc. IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 1-4, 2011.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.