Development Report:
Views over last 60 days: 1,641
Link Type Arm Support Equipment
Kazuto Miyawaki
Department of Mechanical Engineering, National Institute of Technology, Akita College
1-1 Iijima-Bunkyo-cho, Akita 011-8511, Japan
Received:September 11, 2014Accepted:December 19, 2014Published:February 20, 2015
Keywords:rehabilitation, disabled, human dynamics, biomechanics
Abstract
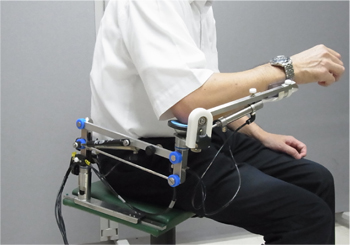
Link type arm support equipment
Cite this article as:K. Miyawaki, “Link Type Arm Support Equipment,” J. Robot. Mechatron., Vol.27 No.1, pp. 110-111, 2015.Data files:
References- [1] K. Miyawaki, T. Sato, T. Iwami, T. Matsunaga, Y. Shimada, and G. Obinata, “Evaluation of utility of the “Arm-Balancer” arm support system,” IEEE Int. Symposium, MHS2010, pp. 208-213, 2010.
- [2] K. Miyawaki, K. Konishi, S. Kizawa, T. Iwami, and G. Obinata, “Measurement of the arm movement using arm support system with three-dimensional acceleration sensor,” IEEE Int. Symposium, MHS2013, pp. 9-14, 2013.
