Review:
Development of Robotic Unicycles
Hisanobu Suzuki*, Shunji Moromugi**, and Takeshi Okura***
*Olympus Imaging Corp., 2951 Ishikawa-machi, Hachioji, Tokyo 192-8507, Japan
**Department of Electrical, Electronic, and Communication Engineering, Chuo University, 1-13-27 Kasuga, Bunkyo-ku, Tokyo 112-8551, Japan
***Mitsubishi Electric Corporation, 1-3-6 Higashikawasaki-cho, Chuo-ku, Kobe, Hyogo 650-0044, Japan

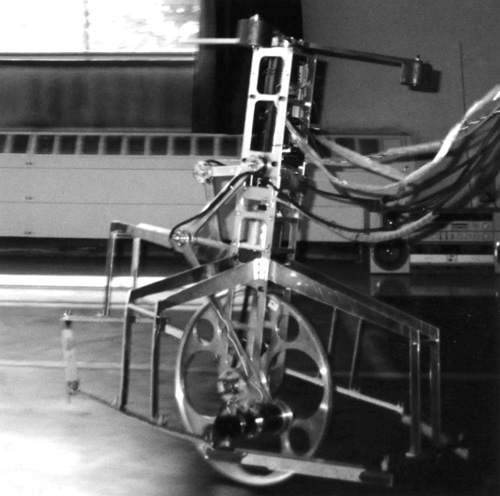 Robotic Unicycle in stable driving
Robotic Unicycle in stable driving- [1] C. Ozaka, S. Kano, and M. Masubuchi, “Stability of a monocycletype inverted pendulum,” Proc. of Symposium of Japan Automatic Control Society, pp. 63-66, 1980 (in Japanese).
- [2] Q. Feng and K. Yamafuji, “Design and Simulation of a Control System of an Inverted Pendulum,” Robotica, Cambridge University Press, Vol.6, No.2, p. 235-241, 1988.
- [3] K. Yamafuji and K. Inoue, “Study on the Postural Stability of a Unicycle,” Proc. of Annual Yamanashi Meeting of Japan Society of Mechanical Engineers (JSME), pp. 4-6, 1986 (in Japanese).
- [4] S. Kawaji, T. Shiotsuki, and N. Matsunaga, “Stabilization of Unicycle Using Spinning Motion,” Trans. of Institute of Electrical Engineers of Japan, Vol.107-D, No.1, pp. 21-28, 1987 (in Japanese).
- [5] A. Schoonwinkel, “Design and Test of a Computer Stabilized Unicycle,” Ph.D. Dissertation, Stanford University, 1987.
- [6] Z. Q. Sheng and K. Yamafuji, “Study on the Stability and Motion Control of a Unicycle (Part 1: Dynamics of a Human Riding a Unicycle and its Modeling by Link Mechanisms,” JSME Int. J., Series 3, Vol.38, No.2, pp. 249-259, 1995.
- [7] Z. Q. Sheng and K. Yamafuji, “Postural Stability of a Human Riding a Unicycle and Its Emulation,” IEEE Trans. on Robotics and Automation, Vol.13, No.5, pp. 709-720, 1997.
- [8] K. Yamafuji, Y. Takemura, and H. Fujimoto, “Dynamic walking control of the one-legged robot which has the controlling rotor,” Trans. of Japan Society of Mechanical Engineers, Vol.57-538C, pp. 1930-1935, 1991 (in Japanese).
- [9] S. Koide, “Analytical Dynamics,” Iwanami Publ. Ltd., 1983 (in Japanese).
- [10] Z. Q. Sheng and K. Yamafuji, “Study on the Stability and Motion Control of a Unicycle (Part 3: Characteristics of a unicycle robot),” JSME Int. J., Series 3, Vol.39, No.3, pp. 560-568, 1996.
- [11] K. Ohkura, K. Yamafuji, and T. Tanaka, “Development and Motion Control of a Unicycle Robot without Extension Cables,” Proc. of AnnualMeeting of Japan Society ofMechanical Engineers (JSME), pp. 1AI3.7(1)-1AI3.7(2), 1998 (in Japanese).
- [12] H. Suzuki, S. Moromugi, and K. Yamafuji, “Motion Principle and Control of a Human Riding Type Robotic Unicycle (Part 1, Mechanisms, Stability Principles and Simulation),” Int. J. of Mechanics and Control, Vol.12, No.2, pp. 1-12, 2011.
- [13] T. Hirabayashi and K. Yamafuji, “Posture and Driving Control of a Variable Structure Type Parallel Bicycle (1st Report, Upright posture and driving control of an arm-wheel model),” Trans. of JSME, Vol.56, No.523C, pp. 721-730, 1990 (in Japanese).
- [14] H. Suzuki, S. Moromugi, and K. Yamafuji, “Motion Principle and Control of a Human Riding Type Robotic Unicycle (Part 2, Motion Principles, Direction Control, Experiments and Simulation),” Int. J. of Mechanics and Control, Vol.12, No.2, pp. 13-20, 2011.
- [15] Z. Q. Sheng, K. Yamafuji, and S. V. Ulyanov, “Study on the Stability and Motion Control of a Unicycle (4th report: Fuzzy Gain Schedule PD Controller for Managing Nonlinearity of Systems),” JSME Int. J., Series 3, Vol.39, No.3, pp. 569-576, 1996.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.