Development Report:
Utilization of Robot Technology for Earthquake, Storm, and Flood Problems in the Tokai Region
Masayuki Okugawa
Department of Mechanical Engineering, Faculty of Engineering, Aichi Institute of Technology, 1247 Yachigusa, Yakusa-cho, Toyota-shi, Aichi 470-0392, Japan

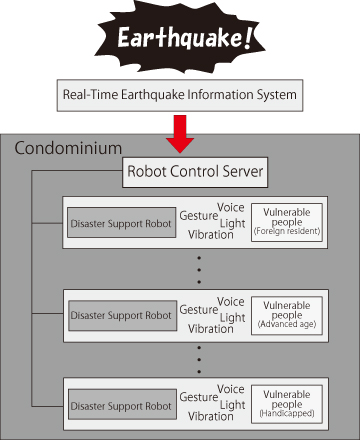 Evacuation support system
Evacuation support system- [1] B. Koto, “On the cause of the great earthquake in central Japan,” J. of the College of Science, Imperial University of Tokyo, Imperial University, Japan, Vol.5, pp. 296-353, 1893.
- [2] Toyota-shi, “Master Plan of Total Stormwater Measures in Toyota,” 2004 (in Japanese).
- [3] Aichi Disaster Prevention Council Secretariat, “Appendix of Aichi Regional Disaster Prevention Plan,” 2011 (in Japanese).
- [4] Toyota-shi and Miyoshi-shi, “Transportation Planning in Toyota and Miyoshi,” 2007 (in Japanese).
- [5] Japan Council for Quick Inspection of Earthquake Damaged Buildings, “Postearthquake Quick Inspection Manual of Damaged Buildings,” 2010 (in Japanese).
- [6] Cabinet Office Japan, “Operational Guidelines for Damage Assessment of Residential Houses in Disasters,” 2013 (in Japanese).
- [7] K. Shigekawa, S. Tanaka, K. Horie, and H. Hayashi, “Some Regulational Issues on Building Damage Assessment: A Case Study of Niigata-ken Chuetsu Earthquake,” J. of the Institute of Safety Science, No.7, pp. 133-140, 2005 (in Japanese).
- [8] S. Tanaka, “Development of Building Damage Self-Assessment Systems for an Effective Victim Support,” J. of the Institute of Safety Science, No.710, pp. 233-242, 2008 (in Japanese).
- [9] M. Fujiu, “Development of Remote System for Supporting Building Damage Assessment During Large-Scale Earthquake Disaster,” Review of Media, Information and Society, No.81, pp. 71-85, 2011 (in Japanese).
- [10] Central Disaster Prevention Council Committees for Technical Investigation on Lessons Learned from Past Disaster, “1959 Report of Typhoon Isewan,” March 2008 (in Japanese).
- [11] Y. Shirai and S. Sugano, “Hopes for Robotics Advancing Forest Industry,” J. of the Robotics Society of Japan, Vol.28, No.1, pp. 43-48, 2010 (in Japanese).
- [12] Y. Shirai and S. Sugano, “A Note About Practical Use of Robots,” J. of the Robotics Society of Japan, Vol.27, No.6, pp. 44-49, 2009 (in Japanese).
- [13] Y. Ishigure et al., “Climbing Robot Equipped With A Postural Adjustment Mechanism For Conical Poles,” Proc. of 16th Int. Conf. on Climbing and Walking Robots and the Support Technologies for Mobile Machines (CLAWAR 2013), pp. 343-350, 2013.
- [14] T. Ohmichi and M. Okugawa, “Study of Universal Information Transmission Method Using Evacuation Action Support Robot For People Requiring Assistance During Disaster,” Proc. of the 12th SICE System Integration Division Annual Conf., pp. 1069-1074, 2012 (in Japanese).
- [15] E. Ferranti and N. Trigoni, “Robot-Assisted Discovery of Evacuation Routes in Emergency Scenarios,” Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA 2008), pp. 2824-2830, 2008.
- [16] D. A. Shell and M. J. Mataric, “Insights Toward Robot-Assisted Evacuation,” Advanced Robotics, Vol.19, No.8, pp. 797-818, 2012.
- [17] P. Robinette and A. M. Howard, “Trust in Emergency Evacuation Robots,” Proc. of the 10th IEEE Int. Symposium on on Safety Security and Rescue Robotics (SSRR 2012), Paper No.19, 2012.
- [18] A. Valada et al., “Development of a Low Cost Multi-Robot Autonomous Marine Surface Platform,” Field and Service Robotics, Vol.92, pp. 643-658, 2014.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.