Paper:
High-Frame-Rate Structured Light 3-D Vision for Fast Moving Objects
Yongjiu Liu*,**,***, Hao Gao***, Qingyi Gu***,
Tadayoshi Aoyama***, Takeshi Takaki***, and Idaku Ishii***
*University of Science and Technology of China, Hefei, Anhui 230026, China
**Institute of Intelligent Machines, Chinese Academy of Sciences, Hefei, Anhui 230031, China
***Hiroshima University, 1-4-1 Kagamiyama, Higashihiroshima, Hiroshima 739-8527, Japan

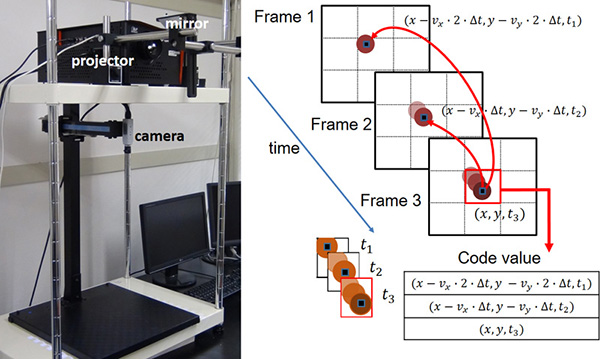
HFR 3D vision system
- [1] J. L. Posdamer and M. Altschuler, “Surface measurement by spaceencoded projected beam systems,” Computer graphics and image processing, Vol.18, No.1, pp. 1-17, 1982.
- [2] J. Pagès, J. Salvi, C. Collewet, and J. Forest, “Optimised de bruijn patterns for one-shot shape acquisition,” Image and Vision Computing, Vol.23, No.8, pp. 707-720, 2005.
- [3] K. Sakashita, Y. Yagi, R. Sagawa, R. Furukawa, and H. Kawasaki, “A system for capturing textured 3d shapes based on one-shot grid pattern with multi-band camera and infrared projector,” 2011 Int. Conf. on 3D Imaging, Modeling, Processing, Visualization and Transmission (3DIMPVT), pp. 49-56, 2011.
- [4] Z. Zhang, “Microsoft kinect sensor and its effect,” Multimedia, IEEE, Vol.19, No.2, pp. 4-10, 2012.
- [5] I. Ishii, T. Koike, H. Gao, and T. Takaki, “Fast 3d shape measurement using structured light projection for a one-directionally moving object,” IECON 2011-37th Annual Conf. on IEEE Industrial Electronics Society, pp. 135-140, 2011.
- [6] H. Yang, Q. Gu, T. Aoyama, T. Takaki, and I. Ishii, “Realtime modal analysis of shell-shaped objects using high-frame-rate structured-light-based vision,” Proc. the 31st IMAC, A Conf. and Exposition on Structural Dynamics, pp. 517-523, 2013.
- [7] N. Karpinsky and S. Zhang, “High-resolution, real-time 3D imaging with fringe analysis,” J. of Real-Time Image Processing, Vol.7, No.1, pp. 55-66, 2012.
- [8] H. Gao, T. Takaki, and I. Ishii, “Gpu-based real-time structured light 3d scanner at 500 fps,” Proc. of SPIE, Vol.8437. p. 84370J-1, 2012.
- [9] I. Ishii, T. Tatebe, Q. Gu, Y. Moriue, T. Takaki, and K. Tajima, “2000 fps real-time vision system with high-frame-rate video recording,” 2010 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 1536-1541, 2010.
- [10] S. Inokuchi, K. Sato, and F.Matsuda, “Range imaging system for 3-d object recognition,” Proc. of the Int. Conf. on Pattern Recognition, pp. 806-808, 1984.
- [11] D. Moreno and G. Taubin, “Simple, Accurate, and Robust Projector-Camera Calibration,” 2012 Second Int. Conf. on 3D Imaging, Modeling, Processing, Visualization and Transmission (3DIMPVT), pp. 464-471, 2012.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.