Research Paper:
Flexible and Safe Robust Position Control of PMSM Servo Drives for Robotic Systems with Unknown Uncertainties
Huixin Liu†, Yonghua Lai, Hongsong Lian, Guobin Wang, and Dongsheng Zheng
Electric Power Research Institute, State Grid Corporation of China
No.48 Fuyuan Branch Road, Cangshan District, Fuzhou, Fujian 350007, China
†Corresponding author

The position control system of servo motors plays a critical role in achieving high-precision and reliable actuation in robotic applications. This study focuses on developing a prescribed-performance robust control strategy for permanent magnet synchronous motor position regulation under uncertainties. An adaptive robust controller (ARC) is, firstly, designed by means of a bounded estimation technique to address parameter uncertainties in servo systems. The controller gains and adaptive law are derived through a rigorous stability analysis, ensuring guaranteed stable position tracking. Meanwhile, a prescribed performance approach is constructed based on control barrier functions (CBFs), enabling real-time correction of the control input via a quadratic programming optimization to guarantee prescribed transient and steady-state tracking performance. Furthermore, the robust safety of the proposed CBF-based ARC method is demonstrated by quantitatively bounding the parameter estimation errors. Compared with existing methods, simulation and experimental results are conducted to confirm the effectiveness and superior performance of the proposed method.
1. Introduction
With the rapid development of power-electronics technology, permanent magnet synchronous motor (PMSM) drives have been widely adopted in robotic servo systems due to their high efficiency, fast dynamic response, and excellent torque density 1,2. In such applications, precise position control plays a critical role in ensuring task accuracy and system stability. However, achieving high-performance position tracking remains a challenging task, especially in the presence of mechanical vibrations and inherent parameter uncertainties 3. These factors can degrade control accuracy, induce chattering, and even destabilize the system if not properly addressed. Therefore, developing an advanced control strategy capable of handling these challenges while guaranteeing robustness and stability is of significant importance for practical robotic applications.
In recent years, researchers have proposed a variety of advanced control strategies for PMSM servo position regulation. Among model-free methods, both conventional proportional-integral-derivative (PID) and intelligent PID controllers are widely used in industrial position loops; however, they suffer from limited robustness and inadequate disturbance-rejection capabilities 4,5. While sliding-mode control (SMC), another model-free strategy, can effectively improve system robustness, its design typically does not incorporate detailed model information. This limitation can still lead to undesirable performance, particularly in systems with strong nonlinear dynamics 6,7. In contrast, model-based approaches, such as state-feedback control (SFC) 8,9 and model predictive control (MPC) 10,11, leverage system dynamics to achieve faster transient response and improved steady-state accuracy. Nevertheless, these methods are vulnerable to model uncertainties and external load disturbances. To address these challenges, adaptive robust control (ARC) methods provide an effective solution for mitigating uncertainties and disturbances. These methods typically involve estimating unknown disturbances using disturbance observer or adaptive law, and then compensating for them in a feedforward manner in real time 12,13,14. In 12, a neural network-based DOB was developed to estimate large uncertainties and external disturbances, thereby enhancing the SMC’s robustness. In 13, a generalized integral-type DOB was integrated into an MPC framework to improve both the prediction accuracy and disturbance rejection capabilities of PMSM. In 14, a novel adaptive law was proposed to capture the uncertain and nonlinear dynamics of the PMSM servo system. However, the existing literature often lacks explicit mechanisms for enforcing constraints on the desired transient response and steady-state tracking performance.
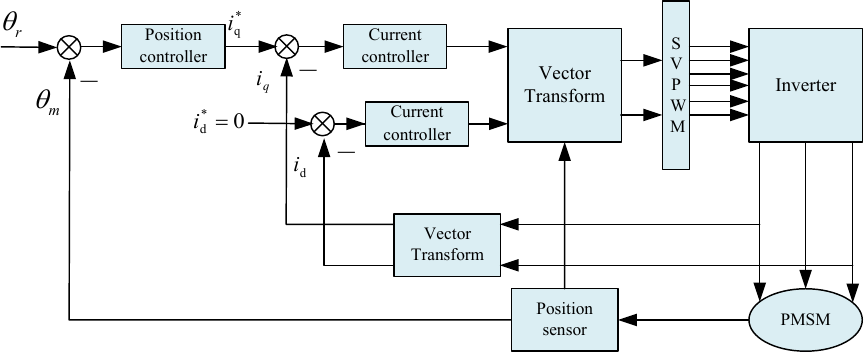
Fig. 1. Field-Oriented Control structure of the PMSM servo system.
Recently, prescribed performance control (PPC) has been developed to enforce predefined bounds on tracking errors. By employing a transformation function, it systematically ensures specified performance metrics such as convergence rate, overshoot, and steady-state accuracy 15. PPC-based control strategies have found wide applications in PMSM servo control 16,17. However, their rigid constraint structure limits them to initial conditions and external disturbances, potentially causing singularities and instability. Notably, control barrier functions (CBFs) have emerged as a computationally efficient tool for ensuring system safety. They achieve this by directly linking state constraints to control inputs, thereby guaranteeing the forward invariance of a safe set 18,19,20. Embedded in a quadratic programming (QP) framework, CBFs can be seamlessly integrated with a feedback controller to satisfy safety requirements while simultaneously achieving performance objectives 21. By reformulating the prescribed performance requirements into compatible CBF constraints on the control input, this method eliminates the singularity issues associated with conventional PPC caused by parameter uncertainty and initial condition settings. Nevertheless, the presence of uncertain parameters may still compromise safety, highlighting the necessity for robust safety assurances.
Based on the above analysis, this paper presents an ARC strategy with a PPC based on CBFs, for position tracking of the PMSM servo system under parameter uncertainties. First, the ARC framework employing a bounded estimation technique is designed to handle parametric uncertainties. The controller gains and adaptive law are derived through rigorous stability analysis to ensure robust position tracking. Simultaneously, a CBF-based PPC scheme is formulated within a QP framework, which dynamically steers the control input to guarantee prescribed transient and steady-state tracking performance. Furthermore, the robust safety of the proposed CBF-ARC method is rigorously verified by deriving quantitative bounds on the parameter estimation errors. Finally, comparative simulation and experimental results demonstrate the effectiveness and superior performance of the proposed method against existing approaches.
2. Problem Formulation on PMSM Servo System
In the \(dq\)-axis reference frame, as shown in Fig. 1, under field-oriented vector control with the \(d\)-axis current set to 0, the mechanical model of the PMSM servo system can be expressed in the following standard form 13:
In PMSM servo systems, significant model uncertainties may arise from load variations, mechanical aging, temperature fluctuations, and modeling errors. To account for these uncertain parameters, Eq. \(\eqref{eq:Eq1}\) is reformulated as follows:
Defining the state variable as \(\boldsymbol{x} = [\begin{matrix} x_{1}& x_{2} \end{matrix}]^{T} = [\begin{matrix} \theta _{m}& \omega_{m} \end{matrix}]^{T}\), the state-space equation is represented as
In a PMSM servo drive shown in Fig. 1, the inner current loops are typically regulated by PID controllers because the decoupled \(dq\)-axis currents behave as first-order, linear subsystems whose primary goal is rapid, accurate torque and flux control. Once the current loops are closed, the motor’s speed and position dynamics can be well approximated by a standard second-order model, as shown in Eq. \(\eqref{eq:Eq3}\).
Assumption 1: In the PMSM servo system \(\eqref{eq:Eq2}\), the parameters \(\bar{J}_{m}\), \(\bar{B}_{m}\), and \(\varphi\) are bounded due to the mechanical characteristics of the PMSM.
3. Adaptive Robust Position Control Design
3.1. Adaptive Robust Controller
Considering parameter uncertainties, this section focuses on designing the ARC controller for the second-order dynamics of the PMSM servo system. Setting the position error as \(e_{1} = x_{1} - \theta_{r}\), where \(\theta_{r}\) denotes the position reference value, Eq. \(\eqref{eq:Eq3}\) is rewritten as
By letting \(Z_{1} = e_{1}\), the Lyapunov function is chosen to be \(V_{1}(t) = 0.5Z_{1}^{2}\), and its time derivative is \(\dot{V}_{1}(t) = Z_{1}\dot{Z}_{1} = Z_{1} \cdot e_{2}\). Setting the intermediate virtual control variable as \(\bar{e}_{2} = -k_{1}Z_{1}\), one can get
Defining \(Z_{2} = e_{2} - \bar{e}_{2}\), its time derivative is given by
Define \(\beta = \max\{\sup|H|, \sup|T_{d}|\}\). Considering the Lyapunov function \(V_{2}(t) = V_{1}(t) + 1/(2\sigma_{1}) \cdot \tilde{\beta}^{2} + 1/2 \cdot Z_{2}^{2}\), its time derivative is processed as follows:
With Eq. \(\eqref{eq:Eq8}\), Eq. \(\eqref{eq:Eq7}\) can be processed as follows:
3.2. Stability Analysis
Theorem 1: Suppose that Assumption 1 holds and consider that the PMSM position control system is composed of the system (Eq. \(\eqref{eq:Eq2}\)), the adaptive law (Eq. \(\eqref{eq:Eq10}\)), and the control input (Eq. \(\eqref{eq:Eq12}\)). There exist any constant \(a_{1} > 0\) such that
Proof. Based on Young’s inequality
Due to \(k_{1} > 0\), \(k_{2} > 0\), and \(\sigma_{2} > 0\), and when Eq. \(\eqref{eq:Eq16}\) holds, Eq. \(\eqref{eq:Eq18}\) can be solved as follows:
∎
4. PPC-Based ARC Controller Design
In this section, we will introduce the CBF safety set to correct the tracking performance of the ARC controller in real time to guarantee that the position control of PMSM is in prescribed performance constraints.
4.1. CBF-Based Prescribed Performance Design
Here, smooth PPC functions are first designed as
The two-order time derivatives of the CBF functions are expressed as follows:
It is worth noting that the CBFs \(F_{1}(t)\) and \(F_{2}(t)\) are subject to safety constraints with relative degree two. To address this, let \(\varPsi_{10} = F_{1}(t)\) and \(\varPsi_{20} = F_{2}(t)\), and design the following auxiliary systems 19.
We next define a family of 0-superlevel sets associated with Eq. \(\eqref{eq:Eq26}\) as follows:
Theorem 2: Consider the PMSM closed-loop position system in Eqs. \(\eqref{eq:Eq3}\) and \(\eqref{eq:Eq12}\), Theorem 1, and the adaptive law in Eq. \(\eqref{eq:Eq10}\) with Assumption 1. If the initial values of \(\varPsi_{10}(0)\), \(\varPsi_{11}(0)\), \(\varPsi_{20}(0)\), and \(\varPsi_{21}(0)\) are all positive, and in addition, the condition in Eq. \(\eqref{eq:Eq30}\) holds.
Proof. According to the prescribed performance constraints given in Eq. \(\eqref{eq:Eq29}\), the inequality \(h_{1} + h_{2} \geqslant 0\) holds, indicating that the satisfaction of condition \(\eqref{eq:Eq30}\) guarantees the feasibility of the safe set. Therefore, the expression in Eq. \(\eqref{eq:Eq27}\) can be further processed as
∎
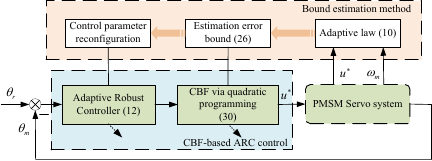
Fig. 2. Control structure of the proposed CBF-ARC controller.
4.2. CBF-Based ARC Implementation via Quadratic Programming
Based on Theorems 1 and 2, the control input \(i_{q} \in K_{\mathit{CBF}}\) is capable of achieving PPC safety constraint. Accordingly, the explicit control law in Eq. \(\eqref{eq:Eq12}\) can incorporate these CBF-based prescribed performance constraints into CBF-ARC through the following QP scheme:
The role of the QP block in Fig. 2 is to serve as a safety-filtering mechanism that unifies the baseline ARC controller with the safety constraints derived from the PPC based on CBF. As demonstrated in Fig. 2, the CBF-based PPC framework modifies the nominal control input \(i_q\) in real time to ensure prescribed performance. The real-time control loop operates as follows: at each time step, the baseline ARC controller first computes a preliminary control input \(i_q\) for optimal tracking; concurrently, the CBF-based PPC module generates safety constraints \(h_{1} + G i_{q} \ge 0\) and \(h_{2} - G i_{q} \ge 0\) that encode the prescribed performance; the QP block then projects \(i_{q}(t)\) onto the set of safe inputs by solving the optimization problem in Eq. \(\eqref{eq:Eq32}\), yielding the final control input \(u^{*}(t)\) that is closest to the baseline ARC input while rigorously satisfying all safety constraints. Thus, the resulting CBF-ARC controller \(u^{*}(t)\) represents the nearest safe control action that guarantees both performance and constraint adherence, achieving a balance between dynamic performance and safety assurance.
4.3. Tuning Guidelines of Control Parameters
The control parameters of the proposed CBF-based ARC approach are systematically selected according to established control principles and theoretical derivations, as detailed below:
-
The gains \(k_1\) and \(k_2\) controller in Eq. \(\eqref{eq:Eq12}\) determine the baseline state-feedback structure of the ARC controller, upon which uncertainty compensation is built through the adaptive law in Eq. \(\eqref{eq:Eq10}\). Consequently, \(k_1\) and \(k_2\) can be systematically selected via pole placement or linear quadratic regulation. On the other hand, the adaptive law involves two tunable parameters: the adaptive gain \(\sigma_2\) which is iteratively increased from a small value to balance convergence speed with noise sensitivity; and the robust gain \(\sigma_1\), a small positive constant ensuring bounded parameter estimates and preventing drift without affecting adaptation.
-
The parameters \(\lambda_1\) and \(\lambda_2\) in the CBF-based PPC framework regulate the flexibility of admissible initial conditions and the strictness of error boundary enforcement. As established in Theorem 2, increasing \(\lambda_1\) enlarges the set \(\bar{\varOmega}\), thereby relaxing restrictions on allowable initial states. In contrast, reducing \(\lambda_2\) helps maintain a safety margin between the tracking error and its performance boundary, thereby improving robustness against potential constraint violations.
Table 1. Parameter configuration of the PMSM.

5. Simulation and Experimental Results
In this section, the effectiveness and advantages of the proposed CBF-ARC controller are validated through MATLAB/Simulink simulations as well as experimental tests.
5.1. Simulation Results and Analysis
The PMSM parameters used in the simulation are provided in Table 1, with the position reference denoted as \(\theta_{r} = 6\sin(\pi{t})\). The parameter settings of proposed CBF-ARC method are given by \(k_{1} = 40\), \(k_{2} = 40\), \(\gamma = 2\), \(\eta = 80\), \(\sigma_{1} = 1\), \(\sigma_{2} = 0.001\), \(\lambda_{1} = 1000\), \(\lambda_{2} = 500\), \(m_{1} = m_{2} = 0.002\), \(\varrho_{1,0} = \varrho_{2,0} = \pi\), and \(\varrho_{1,\infty} = \varrho_{2,\infty} = 0.1\). The following control strategies are included for comparison: the SFC controller (\(l_{1} = 1600\), \(l_{2} = 80\)) in Eq. \(\eqref{eq:Eq33}\) and the ARC controller without PPC designed in Eq. \(\eqref{eq:Eq12}\).
To quantitatively compare the control performance of the proposed method with existing approaches, the following three key performance indices on the position error \(e_1\) are employed: the maximum tracking error (MTE), the integral of absolute error (IAE), and the root mean square error (RMSE) over a time internal \(t \in [0, T]\). These indices are defined as follows:
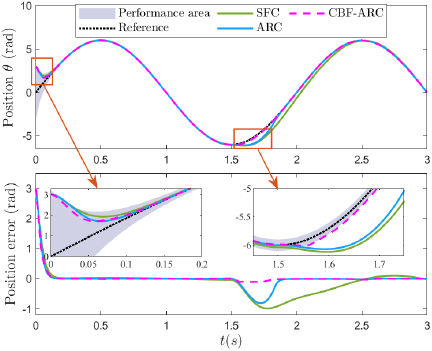
Fig. 3. Simulation results of position response with different methods under Case I.
5.1.1. Case I: Prescribed Performance Test with Step Load Disturbance
At Case I, initial value of angular position is set to \(\theta_{m}(0) = 4\) rad, and to evaluate prescribed control performance under step load disturbance, the following simulations introduce variations in the friction coefficient and inertia, set to \(\bar{J}_{m} = 0.001566\) \(\textrm{kg} \cdot \textrm{m}^2\) and \(\bar{B}_{m} = 0.0036\) \(\textrm{N} \cdot \textrm{m} \cdot \textrm{s} \cdot \textrm{rad}^{-1}\), respectively, at \(t = 1\) s, along with a sudden load torque disturbance of 0.1 \(\textrm{N} \cdot \textrm{m}\) at the same time.
Figures 3–5 show the simulation results under Case I. As shown in Fig. 3, under the prescribed performance constraints, the proposed CBF-ARC method achieves faster convergence compared to the SFC and ARC methods. After \(t = 1.5\) s, the SFC controller exhibits the poorest performance due to parameter uncertainties. In contrast, the ARC method mitigates position error through real-time compensation via adaptive estimation, though it suffers from significant transient spikes. Notably, the proposed CBF-ARC method effectively eliminates large transients while ensuring superior steady-state accuracy under PPC constraints. These performance benefits are further validated by the velocity and current responses in Fig. 4 and the estimation results in Fig. 5. Additionally, as demonstrated in Table 2, the quantitative comparisons reveal that the proposed method is capable of achieving superior control performance in terms of settling time, MTE, IAE, and RMSE metrics, and the numerical results further validate the analysis described above.
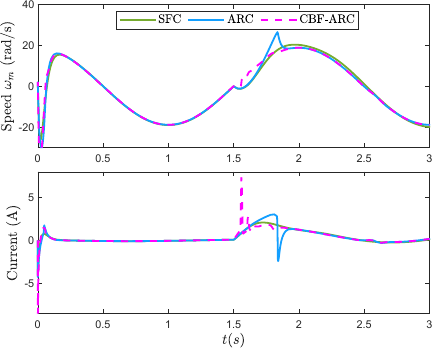
Fig. 4. Simulation results of speed and current response under Case I.
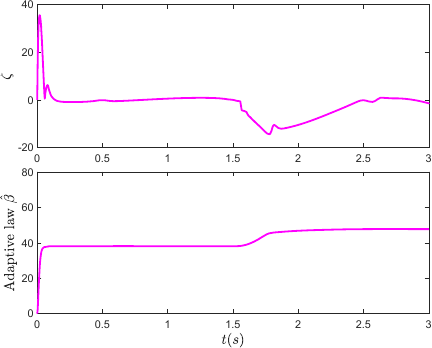
Fig. 5. Estimation results of adaptive law under Case I.
Table 2. Quantitative comparison of simulation results with different methods in Case I.

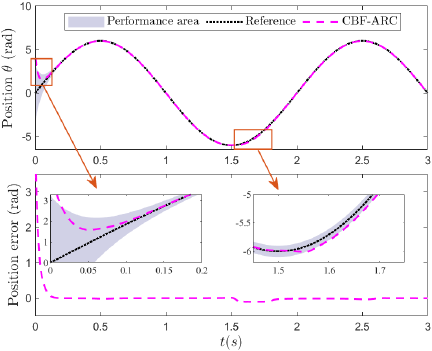
Fig. 6. Simulation results of position response under Case II.
5.1.2. Case II: Non-Local Initial Error Robustness Test
At Case II, initial value of angular position is set to \(\theta_{m}(0) = 4\) rad to test the effectiveness of the proposed CBF-PPC in relaxing the strictly initial state condition, and the load disturbance is the same as Case I.
It should be noted that traditional PPC methods based on error transformation often suffer from singularity issues when the initial tracking error lies outside the prescribed performance bounds, due to their reliance on known initial values 20. In contrast, the proposed CBF-based PPC approach inherently avoids this limitation by reformulating the PPC constraints as a quadratic optimization problem. As the simulation results of Case II illustrated in Fig. 6, even when the initial position of the PMSM lies outside the prescribed performance envelope, the position tracking is rapidly driven back within the desired bounds under the enforcement of the CBF safety set.
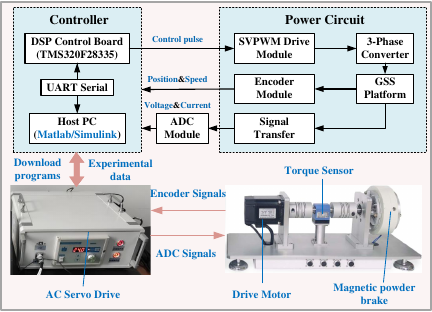
Fig. 7. Experimental platform on the PMSM servo system.
5.2. Experimental Results and Analysis
We will further evaluate the proposed CBF-ARC controller on the PMSM experimental platform shown in Fig. 7, using the parameters listed in Table 1. The hardware setup consists of a host PC used for parameter tuning, signal monitoring, and real-time debugging; a TMS320F28335-based controller that performs all computation and exchanges data with the servo driver via a high-speed CAN bus, supported by a 1024-PPR encoder for rotor position and speed feedback; a TMS320F28069-based servo driver that executes the inner velocity loop; a PB-type magnetic powder brake that generates controlled load torque to emulate external disturbances; and a WTQ1050 torque sensor providing high-precision load-torque measurements for system validation.
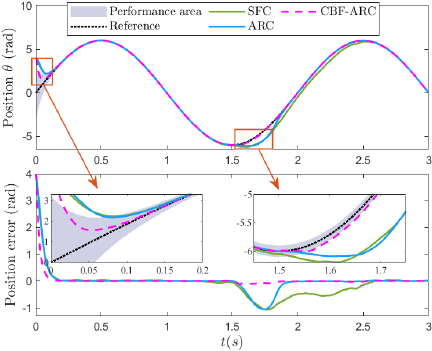
Fig. 8. Experimental results of position response with different methods under Case III.
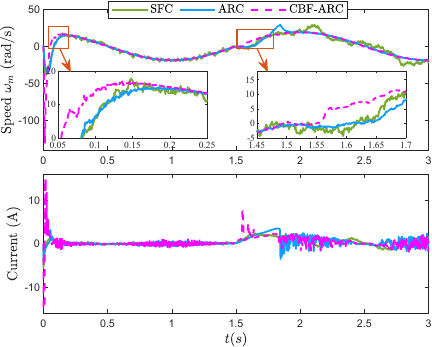
Fig. 9. Experimental results of speed and current response under Case III.
5.2.1. Case III: Prescribed Performance Test with Step Load Disturbances
The conditions of Case III are the same as those for Case I, and in addition, compared to simulation testing, experimental testing of PMSM introduces noise and further parameter uncertainties, which allows for a better evaluation of the control performance of the proposed CBF-ARC method.
Figures 8 and 9 show the experimental results at Case III, from which we observe that the proposed CBF-ARC method demonstrates a decisive advantage over both SFC and ARC across all quantitative performance indices, as summarized in Table 3. Most notably, the MTE is drastically reduced to 0.14, representing only about 13% of the MTE values observed in the SFC (1.07) and ARC (1.05) methods. This signifies a superior capability in limiting the worst-case deviation. Furthermore, the CBF-ARC achieves an exceptional reduction in the IAE, recorded at 40.49, which is merely 5% of the SFC’s IAE and 17% of the ARC’s. This indicates a vastly improved overall tracking precision throughout the response. The RMSE of 0.0671 for the CBF-ARC, substantially lower than that of its counterparts, confirms its effectiveness in minimizing the average error energy. While the settling time of the CBF-ARC (0.135 s) is marginally slower than the SFC (0.075 s), the dramatic enhancement in tracking accuracy justifies this minor trade-off, establishing the CBF-ARC as the most accurate and robust controller for this operational scenario due to the flexible PPC-CBF constraints.
Table 3. Quantitative comparison of experimental results with different methods.

5.2.2. Case IV: Prescribed Performance Test with Sine Load Disturbance
Case IV has the same conditions as Case III, except that a sinusoidal load torque \(T_{L} = 0.1+0.1\sin(6\pi t)\) is introduced at 1.5s to evaluate the effectiveness of anti-interference and prediction performance against time-varying disturbance, rather than step disturbance.
As shown in Figs. 10 and 11, the experimental results of Case IV demonstrate that when the load condition changes from a step disturbance to a sinusoidal disturbance, the performance indicators of all controllers show the expected degradation, but our CBF-ARC method maintained its absolute advantage. Its MTE remains stable at 0.14, while the MTEs of SFC and ARC both exceed 1.16, indicating that CBF-ARC has strong robustness to different types of load disturbances. Although IAE and RMSE increase due to the change in disturbance form, these two indicators of CBF-ARC are still more than 72% and 68% lower than the best comparative method, respectively, fully demonstrating the effectiveness and adaptability of the proposed method under complex operating conditions.
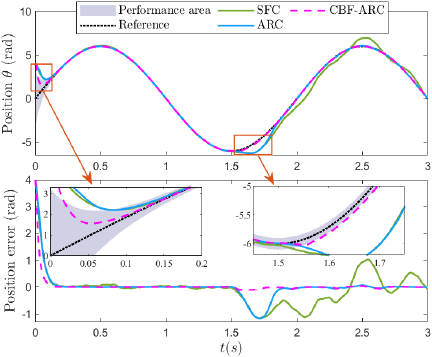
Fig. 10. Experimental results of position response with different methods under Case IV.
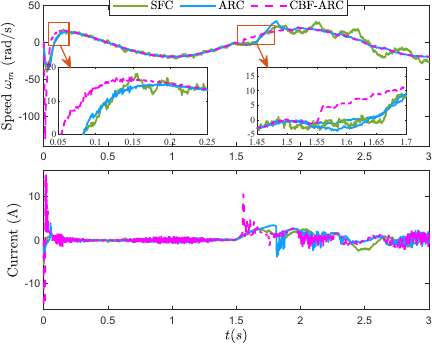
Fig. 11. Experimental results of speed and current response under Case IV.
6. Conclusion
In this paper, the ARC with prescribed performance constraints is proposed for position control of the PMSM servo system, leveraging CBFs to enhance tracking performance and mitigate the impact of parameter uncertainties. The main contribution of this work lies in the development of a CBF-based PPC framework, which enables robust and resilient position regulation for PMSM systems. A thorough theoretical analysis along with rigorous stability proofs is provided to ensure the feasibility and theoretical soundness of the proposed approach. Simulation and experimental results demonstrate that, in comparison to SFC and ARC strategies without prescribed performance constraints, the proposed CBF-ARC controller achieves significantly improved tracking accuracy and enhanced robustness against system uncertainties.
Acknowledgments
This project was supported by Technology Project of State Grid Fujian Electric Power Co., Ltd. under Grant No.52130423000T.
- [1] H. Fan, H. Wei, D. Xu, and Y. Liu, “Closed-loop iterative optimized fractional-order PID current control of PMSM,” IEEE Trans. on Industrial Informatics, Vol.21, No.2, pp. 1120-1129, 2025. https://doi.org/10.1109/TII.2024.3459962
- [2] Y. Hu, W. Zhang, and W. Xu, “Integration design of MR fluid brake-based external rotor PMSM for robotic arm applications,” IEEE Trans. on Magnetics, Vol.61, No.9, Article No.8202705, 2025. https://doi.org/10.1109/TMAG.2025.3548524
- [3] J. Hu, C. He, and Y. Li, “A novel predictive position control with current and speed limits for PMSM drives based on weighting factors elimination,” IEEE Trans. on Industrial Electronics, Vol.69, No.12, pp. 12458-12468, 2022. https://doi.org/10.1109/TIE.2021.3139180
- [4] R. P. Borase, D. K. Maghade, S. Y. Sondkar, and S. N. Pawar, “A review of PID control, tuning methods and applications,” Int. J. of Dynamics and Control, Vol.9, No.2, pp. 818-827, 2021. https://doi.org/10.1007/s40435-020-00665-4
- [5] M. Y. Coskun and M. İtik, “Intelligent PID control of an industrial electro-hydraulic system,” ISA Trans., Vol.139, pp. 484-498, 2023. https://doi.org/10.1016/j.isatra.2023.04.005
- [6] L. Wu, J. Liu, S. Vazquez, and S. K. Mazumder, “Sliding mode control in power converters and drives: A review,” IEEE/CAA J. of Automatica Sinica, Vol.9, No.3, pp. 392-406, 2022. https://doi.org/10.1109/JAS.2021.1004380
- [7] W. He, S. Liu, Z. Zhao, and K. Jie, “Position control of machine tool moving axis based on sliding mode control,” J. Adv. Comput. Intell. Intell. Inform., Vol.25, No.5, pp. 664-670, 2021. https://doi.org/10.20965/jaciii.2021.p0664
- [8] D. Yue, Q.-L. Han, and C. Peng, “State feedback controller design of networked control systems,” Proc. of the 2004 IEEE Int. Conf. on Control Applications, Vol.1, pp. 242-247, 2004. https://doi.org/10.1109/CCA.2004.1387218
- [9] S. Vaidyanathan and A. T. Azar, “An introduction to backstepping control,” S. Vaidyanathan and A. T. Azar (Eds.), “Backstepping Control of Nonlinear Dynamical Systems,” pp. 1-32, Elsevier, 2021. https://doi.org/10.1016/B978-0-12-817582-8.00008-8
- [10] S. Chai, L. Wang, and E. Rogers, “Model predictive control of a permanent magnet synchronous motor with experimental validation,” Control Engineering Practice, Vol.21, No.11, pp. 1584-1593, 2013. https://doi.org/10.1016/j.conengprac.2013.07.008
- [11] H. Chang, S. Lu, S. Zheng, B. Song, and J. Yang, “Integration of predictive control and interconnected structure for autotuning velocity controller,” IEEE/ASME Trans. on Mechatronics, Vol.28, No.6, pp. 3250-3262, 2023. https://doi.org/10.1109/TMECH.2023.3262558
- [12] M. H. Nguyen, H. V. Dao, and K. K. Ahn, “Adaptive robust position control of electro-hydraulic servo systems with large uncertainties and disturbances,” Applied Sciences, Vol.12, No.2, Article No.794, 2022. https://doi.org/10.3390/app12020794
- [13] J. Liu, J. Yang, and S. Li, “Single-loop robust predictive speed control of PMSM system with overcurrent protection: A disturbance preview approach,” 2021 IEEE Int. Conf. on Predictive Control of Electrical Drives and Power Electronics, pp. 645-650, 2021. https://doi.org/10.1109/PRECEDE51386.2021.9680959
- [14] Q. Zhang, R. Yu, C. Li, Y.-H. Chen, and J. Gu, “Servo robust control of uncertain mechanical systems: Application in a compressor/PMSM system,” Actuators, Vol.11, No.2, Article No.42, 2022. https://doi.org/10.3390/act11020042
- [15] J. Na, Q. Chen, X. Ren, and Y. Guo, “Adaptive prescribed performance motion control of servo mechanisms with friction compensation,” IEEE Trans. on Industrial Electronics, Vol.61, No.1, pp. 486-494, 2014. https://doi.org/10.1109/TIE.2013.2240635
- [16] X. Wang, X. Wang, Z. Wang, X. Xiao, and S. Li, “Composite finite-time control for PMSM with prescribed performance using disturbance compensation technique,” Control Engineering Practice, Vol.141, Article No.105677, 2023. https://doi.org/10.1016/j.conengprac.2023.105677
- [17] S. Wang, “Nonlinear uncertainty estimator-based robust control for PMSM servo mechanisms with prescribed performance,” IEEE Trans. on Transportation Electrification, Vol.9, No.2, pp. 2535-2543, 2023. https://doi.org/10.1109/TTE.2022.3212671
- [18] A. D. Ames, X. Xu, J. W. Grizzle, and P. Tabuada, “Control barrier function based quadratic programs for safety critical systems,” IEEE Trans. on Automatic Control, Vol.62, No.8, pp. 3861-3876, 2017. https://doi.org/10.1109/TAC.2016.2638961
- [19] W. Xiao and C. Belta, “High-order control barrier functions,” IEEE Trans. on Automatic Control, Vol.67, No.7, pp. 3655-3662, 2022. https://doi.org/10.1109/TAC.2021.3105491
- [20] X. Wang, Y. Jiang, J. Yang, Y. Yan, and S. Li, “Prescribed performance motion control: A control barrier function approach,” IEEE Trans. on Industrial Electronics, Vol.71, No.12, pp. 16377-16387, 2024. https://doi.org/10.1109/TIE.2024.3384527
- [21] A. D. Ames, J. W. Grizzle, and P. Tabuada, “Control barrier function based quadratic programs with application to adaptive cruise control,” 53rd IEEE Conf. on Decision and Control, pp. 6271-6278, 2014. https://doi.org/10.1109/CDC.2014.7040372
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.