Research Paper:
IoT-Driven Community Sports Management: Machine Learning for Data Processing
Mingkai Cheng and Wu Lv†
Jiaozuo Normal College
No.998 Shanyang Road, Shanyang District, Jiaozuo, Henan 454000, China
†Corresponding author

Community sports management is influenced by complex social factors, and there are many sports events, making it difficult to achieve reliable sports identification and data processing. In order to improve the efficiency of community sports management, this paper proposes a two-person interactive action recognition algorithm based on weight fusion. The algorithm can recognize single-player atomic actions and two-player interactive actions. Among them, the single-player atomic action is recognized by the shapelet method, and the recognition results of two-player interactive actions are obtained by weight fusion of the recognition results of single-player atomic actions. In addition, based on the algorithm model, an intelligent management system for community sports is constructed. Finally, the analysis of the test results shows that the algorithm has higher accuracy in community sports recognition than existing algorithms. It also achieves higher practical performance and enables action recognition through terminal sensors, promoting community sports management.
1. Introduction
In community sports management, it is crucial to first determine the interactive behavior between two people. This can not only more accurately identify and analyze complex interactive actions in sports activities and improve the accuracy of action recognition, but also provide more detailed and accurate information bases for subsequent sports data analysis, personalized sports suggestions, and sports safety monitoring. This comprehensively improves the intelligence level and user experience of community sports management.
Indeed, there are differences in the signage required between competitive and community sports. In competitive sports, identity recognition is not the main focus because of the clear and relatively stable identities of participants. However, in community sports, participants have diverse identities and high mobility, making it particularly important to determine their identities and behaviors. This not only helps to accurately record each person’s exercise data and provide personalized exercise advice, but also ensures sports safety and the effective provision of follow-up services. Although the capabilities of the underlying sensing devices are similar, community sports have effectively filled the gap in identity recognition between competitive sports and community sports by introducing more advanced identity recognition technologies and data analysis methods.
There are significant differences between competitive and community sports in terms of identification requirements and sensing device capabilities. Competitive sports usually use professional-grade sensing devices to capture precise motion data of athletes, with the core goal of improving athletic performance and performance analysis; identity recognition is not the focus. Community sports, on the other hand, place greater emphasis on universality and participation. Facilities such as smart health tracks require identity recognition to provide personalized data feedback and scientific fitness guidance. This difference stems from the fact that community sports need to serve a large nonprofessional population and incentivize continuous participation. Although community sports equipment may not be as accurate as professional equipment used in competitive sports, it has filled the technological gap through Internet of Things (IoT) technology and gamified design, enabling ordinary residents to have a data-driven fitness experience.
The main body of national fitness participants is the people, and its core is people-centered. Therefore, as the most direct and effective units of sports policy implementation, communities play an obvious role in the background of the new era. Before the implementation of the national fitness policy, the development of sports was biased toward competitive sports, whereas the development of mass sports was relatively late and slow. Community sports have gradually attracted attention in recent years. However, the concept of community sports organizers has not been established, and there are many social problems caused by insufficient functional orientation or even the deviation of community sports from community work.
The existing research lacks an overall grasp of community work responsibilities and the extension requirements of national policies. It also downplays the connection and influence between community workers and community sports organizations, and ignores the proportion of community sports resources and the overall cultural resources of the community environment, which provides space for this research. Under the strategic guidance of sports power, when studying community sports social work, the community, as the end execution link of China’s administrative unit, needs to pay attention to the political, economic, and cultural background of community development and focus on the intervention of social work and the consideration of overall community work resources in community sports. At the same time, from the perspective of specific administrative organization requirements and benefit source analysis, it is necessary to analyze the functional orientation, target responsibility, marketing factors, and existing difficulties of community sports in community social work to put forward better and more reasonable development countermeasures. It is also necessary to form suggestions, promote a better and more reasonable support system and refined governance system, and make all kinds of planning, construction, and scientific guidance take precautions 1.
The existing research has not formed a unified definition of community sports governance. Among them, the most representative viewpoint is that community sports governance is a process that aims to meet the sports needs of community residents and solve the difficult affairs existing in community sports to optimize community order and promote the interests of public sports. In this process, administrative organizations, resident autonomous organizations, social organizations and residents can all be the main bodies of governance, and these goals can be achieved through equal consultation and participation. Additionally, some scholars believe that the subjects of community sports governance include sports management departments, neighborhood committees, sports associations, and markets, which further expands the scope of participation in community sports governance 2.
In IoT sports management, the current recognition of two-person interactions is based primarily on visual information. For inertial sensors, constructing a motion model for two-person interactions from a global perspective is difficult. Relatively few studies have been conducted on interactive action recognition based on inertial sensors 3.
Because of the difficulty in constructing a global action model for a two-person interaction process using inertial sensors, this study decomposes the two-person interaction action into a combination of single-person atomic actions and provides recognition results for both single-person and interaction actions. Owing to the excellent classification performance of shapelets and their superior accuracy and speed over other classifiers, this study introduces the features of shapelets to improve the recognition rate of interactive actions. In addition, owing to the flexible binding of inertial sensors to different parts of the human body, this study examines the impact of different combinations of body parts on the recognition results for each type of two-person interaction action.
This study proposes a two-person interaction action recognition algorithm based on hierarchical fusion. By decomposing two-person interaction actions into combinations of single-person atomic actions, this algorithm can recognize both single- and two-person interaction actions. As a new feature-representation method, this study introduces the shapelet method for single-person atomic action recognition and experimentally verifies its superiority.
Although existing research 4,5,6 emphasizes the principles and framework for building smart sports service systems, there has been no in-depth exploration of specific action recognition technologies. This study adopts a shapelet-based method to recognize single-person atomic actions and accurately recognize two-person interaction actions through a weighted fusion strategy. The experimental results show that the recognition accuracy of our algorithm in various community sports is significantly higher than that of traditional algorithms, with an average recognition rate of 98.11%, reflecting a higher technical accuracy.
Data-processing efficiency: The community sports management system constructed in this study combines IoT technology to achieve real-time collection and processing of sports exercise information for community residents, thereby significantly improving data-processing efficiency. In contrast, although existing research has proposed a direction for building smart sports service systems, there has been relatively little involvement in the specific implementation and verification of data-processing efficiency.
Comprehensive system model: This study not only proposes a two-person interaction action recognition algorithm, but also constructs a comprehensive intelligent governance system model for community sports based on social ecology models and other related theories, covering multiple aspects such as data management platforms and IoT system models. However, existing research has mainly focused on the principles and frameworks of service systems, with limited comprehensive exploration of system models.
In summary, this study constructs a high-precision, efficient, and comprehensive community sports management system by introducing advanced machine learning algorithms and IoT technology. Compared with existing intelligent sports service systems, it shows significant progress in action recognition accuracy, data-processing efficiency, and system comprehensiveness.
2. Related Work
2.1. Community Sports
Community sports are a type of social sport characterized by autonomy, public welfare, diversity, interest, and service. They are mainly organized and participated in by residents of a specific community. They use simple sports equipment and facilities to achieve physical fitness, leisure, entertainment, and social communication through various activities 7. These activities include table tennis, basketball, rope skipping, badminton, and other sports. In practice, community sports activities are organized in various forms, including online activities such as cloud punching, cloud competitions, and sports shows, as well as offline activities such as group-buying sports courses organized within the community. These activities not only meet the fitness needs of residents, but also provide platforms for display and communication 8.
The first area of research focuses on community sports systems, governance paths, and operational mechanisms. Chu et al. 9 suggested that social organizations, as one of the multiple subjects in urban community sports governance, have contributed to the development of urban community sports during social modernization, promoted a balance between the supply and demand of urban community sports, and supported the growing sports needs of the public.
The second area of research discusses existing problems in community sports and research on specific countermeasures. From the perspective of multichain integration in urban community sports facilities 10, Yadav et al. 11 analyzed the existing problems and corresponding development strategies of urban community sports, examining the connotations and dilemmas of modernizing community sports governance capabilities. Ramkumar et al. 12 analyzed community sports from different angles, and their study also represents a significant contribution to community sports research. In summary, although research on community sports is currently rich, its themes are overly concentrated. The next step should be to expand research horizons by exploring the shortcomings and advantages of traditional community sports, the development of smart community sports, and comparative research on community sports domestically and internationally.
2.2. Smart Community Sports
Sarlis et al. 13 proposed building a public service system for smart community sports in Hangzhou, China. Chidambaram et al. 14 argued that smart community sports should adhere to the principles of people orientation, resource integration and optimization, responsibility, and joint cooperation. The construction of an intelligent service system for community sports includes the platform’s basic framework, main functions, supply system, content structure, and operation. In the future, greater policy support, diversified cooperation, stronger government responsibilities, improved departmental coordination, and technological innovation will be needed to promote stable, rapid, and sustainable development of smart community sports services for the elderly 15. Cao 16 analyzed practical dilemmas faced by national smart community sports and proposed corresponding strategies. Starting from changes in community sports governance, the study in 17 examined new challenges that a complex society posed to community sports governance and proposed a generative method for governance logic in the context of digital empowerment. The first step is to transform community sports governance from “inclusive” to “responsive” by expanding the scope of smart sports services 18. The second is to achieve refined personnel management and promote the transformation of community sports governance from “overall rectification” to “overall intellectual governance.” The third is to enhance the state’s coverage of and influence on community sports governance by expanding service technologies 19.
2.3. Research on IoT Sports Interaction Recognition
The current research status of sensor–action interaction recognition is characterized by continuous technological innovation and wide application fields, but it still faces some challenges.
In recent years, significant progress has been made in sensor–action interaction recognition technology. In terms of technological innovation, the development of microsensors, multimodal sensors, and intelligent sensing technologies has provided more accurate and efficient means for sensor–action interaction recognition. These technologies enable sensors to perceive, detect, and convert various physical, chemical, or physiological quantities in the environment, thereby achieving accurate recognition of human movements and postures 20.
Sensor–action interaction recognition technology has been widely applied in multiple fields, such as smart homes, industrial automation, and healthcare. In smart homes, sensors are used for security, environmental monitoring, and automation control to improve comfort and intelligence levels within the home environment. In industrial automation, sensors are widely used in the automated control of production lines, path planning, and action recognition of robots, and have become key technologies for achieving industrial automation and intelligence. In healthcare, sensors are used for health monitoring, rehabilitation training, and auxiliary diagnosis, providing strong support for medical diagnoses and treatments 21.
However, sensor–action interaction recognition technology still faces challenges. Wearable sensors have shortcomings in comfort, measurement accuracy, stability, and data transmission speed, which may affect the accuracy and reliability of data 22. Despite new technologies such as visual language-based behavioral interaction models, there is still a need to address issues such as high operational complexity and learning costs, as well as insufficient intelligence and adaptability in practical applications 23.
In summary, the current research status of sensor–action interaction recognition is characterized by continuous technological innovation and wide application fields. However, some technical challenges must be overcome to achieve broader applications and deeper development 24.
In IoT sports management, the current recognition of two-person interactions is primarily based on visual information. For inertial sensors, constructing a motion model for two-person interactions from a global perspective is challenging. Research on interactive action recognition based on inertial sensors remains limited, making it difficult to achieve real-time transmission of human–computer interaction data, which hampers the improvement of time-management efficiency in community sports.
To improve the efficiency of community sports management, a two-person interaction action recognition algorithm based on hierarchical fusion was proposed. Compared to individual recognition, group recognition is more efficient. Moreover, it can improve the accuracy of feature advancement by recognizing single-person atomic actions and two-person interaction actions, which has significant advantages over existing research.
This paper presents a recognition algorithm for two-person interactions based on hierarchical fusion. By decomposing a two-person interaction into a combination of single-person atomic actions, the algorithm can recognize both single-person atomic actions and two-person interactions. As a new feature-representation method, the shapelet method is introduced to recognize a single atomic action. Considering the long running time of the shapelet method, a hierarchical fusion recognition algorithm based on acceleration signals is proposed. To reduce running time, a weight-based shapelet method is developed for the recognition of a single atomic action for multidimensional acceleration signals. Using the fusion strategy, the recognition results of the single-person atomic actions are fused again to obtain the recognition results of the two-person interaction action.
3. Action Recognition Model Combined with IoT
3.1. Two-Person Interactive Action Recognition Algorithm
This study uses a two-person interaction method for model construction, and its requirements are as follows:
(1) Importance of weight determination
Limitations of traditional methods: In the recognition of two-person interaction actions, using fixed weights (such as \(0.5{:}0.5\), \(1.0{:}0.0\), or \(0.0{:}1.0\)) may not accurately reflect the actual contributions of different participants to the interaction action. Fixed weights ignore individual differences among participants and the specific contexts in which actions are performed.
Advantages of weight fusion: The weight fusion-based two-person interaction action recognition algorithm proposed in this study can more accurately reflect the actual characteristics of two-person interaction actions by dynamically adjusting the weights of the single-person atomic action recognition results for different participants. This method overcomes the limitations of the traditional fixed-weight methods and improves the accuracy and robustness of action recognition.
(2) Recognition of complex interactive actions
Challenges of traditional shaping methods: In complex pairs of interactive movements, such as in adversarial sports (soccer, basketball, etc.), the impact of different participants’ movements on the final interaction results changes dynamically. The traditional single-person shape method makes it difficult to capture this dynamic change; therefore, it performs poorly in recognizing complex interactive actions.
The advantages of the IM-shapelets method are as follows: By introducing a weight fusion strategy, the IM-shapelets method can flexibly adjust the weights of individual atomic action recognition results for different participants, thereby more accurately identifying complex two-person interaction actions. The experimental results show that in various community sports, the recognition accuracy of the IM-shapelets method is significantly higher than that of traditional methods, with an average recognition rate of 98.11%.
(3) Enhance intelligence levels in community sports management
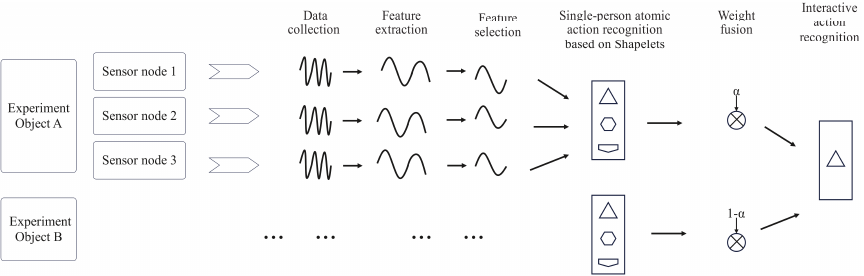
Fig. 1. Interactive action recognition algorithm.
Data-driven decision support: By accurately identifying the interactions between two people, the community sports management system constructed in this study can provide more detailed and accurate data for community sports management. These data will help community sports managers develop more scientific and reasonable exercise plans and personalized exercise recommendations, thereby enhancing the intelligence level of community sports management.
Promoting residents’ health and community harmony: Accurate action recognition and data processing can help enhance residents’ exercise experiences and participation, promoting their health and community harmony. Simultaneously, through data analysis and mining, the community sports management system can discover potential sports safety hazards and provide residents with a safer and more comfortable sports environment. In summary, the weight fusion-based two-person interaction action recognition algorithm proposed in this article and its application in community sports management overcome the limitations of traditional methods and improve the recognition ability of complex interaction actions, enhancing the intelligence level of community sports management and residents’ health. Therefore, the model is necessary and practically valuable for community sports management.
The single atomic actions of the two experimental subjects may have different effects on the recognition of interactive actions. In addition, inertial sensors have difficulty constructing a motion model of the two-person interaction process from a global perspective. To address these issues, the recognition results of single-person actions and interactive actions are given in turn when designing the model. In particular, for the recognition of interactive actions, individual atomic actions of different experimental subjects are assigned different weights. Based on real-time information such as user feedback and system performance evaluation, the weight of each model or feature is dynamically adjusted. For example, when a model performs well in a specific scenario, its weight can be increased to utilize its advantages 25.
This algorithm decomposes an interactive action into a combination of single atomic actions. First, a single atomic action is recognized, and the recognition results of the interactive action are obtained by fusing the recognition results of the single atomic action using a shapelet-based method. The two-person interaction action is obtained by the weight fusion of the recognition results of the single-person atomic action. Shapelets are subsequences of the time series used for classification. Shapelets have proven to be an effective classification method and can be more accurate than other classifiers.
This study uses mainstream action recognition algorithms as baselines, including probabilistic models (Naive Bayes, NB), decision trees (C4.5), ensemble learning (random forest, RF), and similarity matching (\(k\)-nearest neighbor, KNN) 20,21,22,26, and quantifies performance differences through experiments. As shown in Fig. 1, in a two-person interaction, the individual atomic actions of two experimental subjects may have different effects on their final recognition of the interaction actions. Therefore, it is wise to assign different weights to the recognition results of different experimental subjects; this study uses weighted fusion to fuse the recognition results of single-person atomic actions. Specifically, single-person atomic actions are recognized using the shapelet-based method (Eqs. \(\eqref{eq:17}\)–\(\eqref{eq:20}\)). Then, the recognized single-person atomic actions are fused (Eqs. \(\eqref{eq:14}\)–\(\eqref{eq:16}\)), ultimately achieving the recognition of two-person interactive actions.
The single-person atomic action recognition results of the two experimental subjects are \(R_A\) and \(R_B\), respectively, with the corresponding weights. The recognition result, \(R_{\mathit{AB}}\), of the two-person interaction actions can be obtained through a weighted fusion: \(R_{\mathit{AB}}=\alpha\cdot R_A+\beta\cdot R_B\).
A shapelet-based method is used to identify single-person atomic actions. Shapelets are a time-series classification method based on the similarity principle proposed by Ye et al. 19. A shapelet is a small discriminative subsequence of a time series used for classification, and can represent a specific category. The shapelet method used in this study is a classification method based on shape similarity. In addition, the shapelet classification method has been proven to be effective and has higher accuracy than general machine learning classifiers. It has faster speed and stronger interpretability than traditional time-series classification methods.
1) Time series: The time series \(T=\{t_1,t_2,\dots,t_n\}\) is a real-valued series of length \(n\). Each time series belongs to a category \(k\in K\), where \(K\) is the set of category labels. Generally, \(t_i\), \(i\in\{1,\dots,n\}\) is the data collected at time \(i\), and \(t_i\) may be univariate or multivariate.
2) Subsequence: A subsequence is a continuous sequence on a time-series \(T\). \(T_{i,j}=\{t_i,t_{i+1},\dots,t_j\}\) represents a subsequence with starting point \(i\) and length \(j-i+1\).
3) Time-series distance: For two time-series \(T\) and \(R\) of the same length \(l\), where \(t_i\) and \(r_i\) represent the \(i\)-th element in \(T\) and \(R\), respectively, the distance between them can be measured using different metric functions depending on the specific situation. Several common measurement functions are introduced below.
Euclidean distance 27:
Cosine distance:
Chebyshev distance:
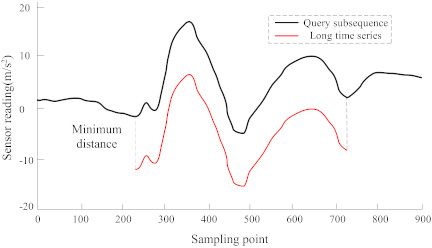
Fig. 2. Calculation legend of minimum distance between subsequence \(S\) and time-series \(T\).
Manhattan distance:
Mahalanobis distance:
\(C_{T,R}\) represents the correlation coefficient between \(T\) and \(R\).
Minkowski distance:
4) Subsequence distance between subsequences and time series: For time-series \(T\) and subsequence \(S\), the distance between \(S\) and \(T\) is defined as:
\(T^S\) represents all subsequences in \(T\) that have the same length as \(S\). As shown in Fig. 2, the distance between the time-series \(T\) and the subsequence \(S\) is defined as the distance between all subsequences of the same length as \(S\) and \(S\) in \(T\). The minimum value of the distance is the distance between the time-series \(T\) and the subsequence \(S\).
Considering that the length of the subsequence is different from that of the time series, it is also possible to consider using dynamic time warping (DTW) for the metrics. The implementation process for DTW is as follows.
The length of the time-series \(T=\{t_1,t_2,\dots,t_n\}\) is \(n\), and the length of the subsequence \(S=\{s_1,s_2,\dots,s_l\}\) is \(l\), and a matrix \(Q\) of size \(n\times l\) are constructed. The matrix element \((i,j)\) represents the distance between points \(t_i\) and \(s_j\) (usually the Euclidean distance \(d(t_i,s_j)=(t_i-s_j)^2\) is used). The smaller the distance, the higher the similarity between them. In contrast, similarity is low. An alignment path \(W\) is then constructed from the matrix.
This path satisfies the following conditions:
Continuity: If \(w_{k-1}=(t_i,s_j)\) occurs, then the next point \(w_k=(t_{i'},s_{j'})\) of the path must satisfy the following conditions:
Boundaries: The selected path must begin at the starting point of the matrix and end at the other end of the diagonal. Thus, the following conditions are satisfied: \(w_1=(t_1,s_1)\) and \(w_K=(t_n,s_l)\).
Monotonicity: The points on a path must increase monotonically over time. In other words, if \(w_{k-1}=(t_i,s_j)\), the next point \(w_k=(t_{i'},s_{j'})\) of the path must satisfy the following conditions:
DTW aims to find a path that minimizes the cost of regularization:
Starting from the initial point \((t_1,s_1)\) and before reaching the endpoint \((t_n,s_l)\), the distance of each point on the subsequent path is the sum of the distances of the points on the previous path. If one point on the path is \(w_{k-1}=(t_i,s_j)\), the next point on the path can only be one of the following situations 28:
Then, the cumulative distance is \(D(t_i,s_j)=d(t_i,s_j)+\min\{D(t_{i-1},s_j),D(t_i,s_{j-1}),D(t_{i-1},s_{j-1})\}\).
When the endpoint \((t_n,s_l)\) is reached, the cumulative distance \(D(t_n,s_l)\) is the DTW distance \(D(T,S)\), that is \(D(T,S)=D(t_n,s_l)\).
5) Candidate shapelets: A dataset containing \(N\) time-series \(\{T(1),T(2),\dots,\mkern-2mu T(n)\}\) was set, and the dataset belonged to the \(K\) categories. The candidate shapelets of the time-series \(T(n)\) are all subsequences of \(T(n)\), where \(n\in\{1,\dots,N\}\).
3.2. Single-Person Atomic Action Recognition
In the first class of classification technology based on shapelets, for the method of constructing a decision tree using shapelets, the classification process includes: (1) generating a candidate set of shapelets, (2) traversing the shapelet candidate set, and finding the subsequence with the largest information gain as shapelets. The detailed process is as follows:
(1) Generating the shapelet candidate set: First, the length range (min, max) of candidate shapelets is given. Then, all the time series in the training set are traversed, and all the subsequences whose lengths fit the given range are found to join the shapelet candidate set using the sliding window method. A more detailed procedure was described when this method was introduced.
(2) Traversing the shapelets candidate set and finding the subsequence with the greatest information gain as shapelets: For each subsequence in the shapelets candidate set, its distance from all time series in the training set is first calculated. After calculating the distance, for each candidate shapelet, the information gain of dividing all samples into left and right subtrees using the candidate shapelet and the threshold of the distance is calculated. The calculation process is as follows. Samples whose distances are less than the threshold are divided into the left subtree, and samples whose distances are greater than the threshold are divided into the right subtree. Then, the information gain is calculated according to the information entropy before and after division, respectively. If it is assumed that the proportion of the \(k\)-th sample in the current dataset \(N\) is \(p_k\), the information entropy of the set \(N\) is defined as 29:
Based on the shapelet and distance thresholds, the current sample is divided into left and right subtrees. \(n\) represents the subsequence in the set \(N\). \(\tau\) represents the distance threshold. The dataset of the left subtree after division is recorded as \(N_{1}\), and that of the right subtree is recorded as \(N_2\). Subsequently, the left and right subtrees after division are
Then the information gain \(\textit{Gain}(N,\textit{sp})\) is calculated by the following formula:
Among them, \(\textit{sp}\) is a split point.
This method has a relatively high time complexity when calculating the information gain of each candidate shapelet. Therefore, the optimal shapelets are directly determined according to the distance between the candidate shapelets and all the time series in the training set. The steps are as follows.
Action recognition includes three steps: generating candidate shapelets, computing the distance between the candidate shapelets, and evaluating the shapelets. First, the candidate shapelets contain all subsequences in the dataset that meet the predetermined length. Each candidate shapelet is then evaluated according to the preset conditions, and the best shapelets are obtained. The preset condition is the measured distance.
In particular, when candidate shapelets are generated, the time-series \(T=\{t_1,t_2,\dots,t_n\}\) contains \((n-l)+1\) subsequences of length \(l\). If \(T_{i,i+m-1}(1\le i\le (n-l+1))\) represents a subsequence with a starting position of \(i\) and a length of \(m\), then the candidate shapelets of length \(m\) can be expressed as
Thus, for a given dataset \(\{T(1),T(2),\ldots,T(N)\}\) containing a time-series \(N\), the candidate shapelets of length \(m\) can be expressed as
If the length of the candidate shapelets is assumed to be in the range (min, max), then the candidate shapelets of a given dataset can be expressed as
Shapelet: If a dataset containing \(N\) time series is given, \(T_i\) is the time series belonging to category \(i\). Then, the shapelet for action \(a_i\) is defined as follows:
3.3. Data Preprocessing and Weight Fusion
(1) Data preprocessing
In the data preprocessing stage, seven features were selected: mean, variance, covariance, kurtosis, correlation coefficient, skewness, and energy. The feature dimensions were 210 (\(7~\mathrm{features} \times 6~\mathrm{axis~inertial~data} \times 5~\mathrm{sensors}\)). The ReliefF feature selection algorithm was used to reduce the feature dimensions. This algorithm sorts each feature by assigning weights.
The weight is calculated based on the correlation between the features. The ReliefF algorithm is as follows.
We set that the \(i\) feature set of the sample is \(D=\{X_1,X_2,X_3,\dots\}\), where \(i\in\{1,2,\dots,I\}\) is the feature vector corresponding to the \(i\)-th sample. \(I\), the number of samples, also known as the number of features; \(K\), for feature length; \(y=\{y_1,y_2,\dots\}\), to label the corresponding category; \(C\), the number of categories for the sample. The ReliefF algorithm randomly selects a feature from the feature set \(D\) and then \(X_i\) finds \(l\) nearest neighbor samples \(lH_j\) (nearest hits) from the same feature set, \(j\in(1,2,\dots,l)\). Then, \(X_i\) finds \(l\) nearest neighbor samples \(lM_j(C)\) (nearest misses) from each feature set of different classes, \(j\in (1,2,\dots,l)\). The \(X_i\) weight of the features can be calculated and updated according to the following formula:
Among them, \(\textit{weight}_{X_i}(k)\) is the \(k\) weight of \(X_i\) middle feature. The \(X_i\) category of \(\textit{class}(X_i)\) is the extracted features; The \(k\) absolute difference \(lH_j\) between the \(\textit{diff}(k,X_i,lH_j)\) feature \(X_i\) and the \(i\)-th feature; The \(k\) absolute difference \(lM_j(C)\) between the \(\textit{diff}(k,X_i,lM_j(C))\) feature \(X_i\) and the \(i\)-th feature. The \(X_i\) size of the absolute difference represents the ability of the feature to distinguish between two samples. \(m\) is the number of feature extraction iterations, also known as the number of cycles. The \(D\) proportion of the \(\textit{p}(c)\) class feature in the entire feature set is represented by the following equation:
This process was repeated \(m\) times to obtain weight values for each feature. The larger the weight value of a feature, the stronger its classification ability; conversely, the weaker its classification ability.
After the weight calculation, the features were arranged according to their weight values. Based on the set threshold, features with weight values higher than the threshold were selected and used to form a new feature subset, thus completing the feature selection process.
(2) Weight fusion
After obtaining the recognition results of single-person actions, a fusion strategy was used to fuse them to obtain the recognition results of two-person interaction actions. It is wise to assign different weights to the recognition results of different experimental subjects, considering that some classifiers may achieve better results than others when classifying separately or partially. In experiments, the recognition result of a single atomic action of one experimental subject may be better than that of another experimental subject in interaction. Specifically, the optimal weights were obtained through extensive experimental calculations.
The fusion strategy adopted mainly consists of the following steps:
-
1)
After obtaining the recognition results of two single-person atomic actions in a two-person interaction, normalize the recognition results and record them as \(F_L\) features \(F_R\).
-
2)
The features obtained in the first step are merged to obtain new features:
\begin{equation} \label{eq:23} F=\left[\alpha F_{L}\beta F_R\right]. \end{equation}Among them, \(\alpha\) and \(\beta\) are weight values, satisfying \(\alpha+\beta=1\).
-
3)
The optimal value is calculated through extensive experiments using \(\alpha\) and \(\beta\).
-
4)
The KNN classifier was used to recognize the two-person interaction action based on the fused feature vector.
The above summary describes the shape method based on weight fusion, which is called IM-shapelets. This method is more suitable for multitarget recognition.
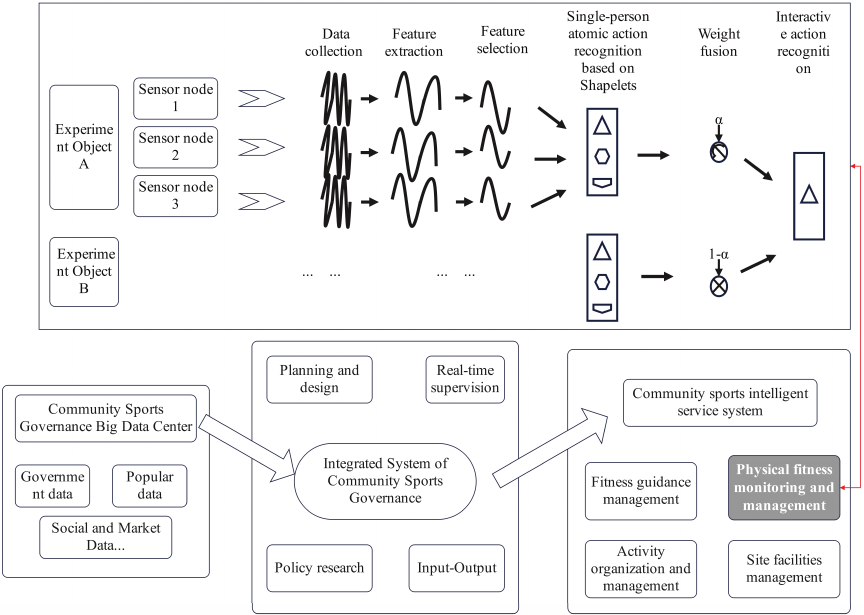
Fig. 3. Structure of intelligent governance system for urban community sports.
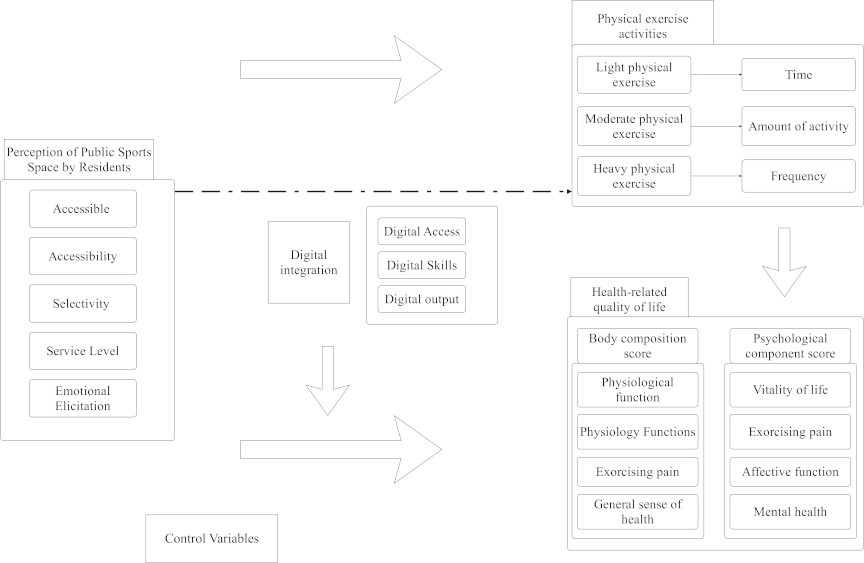
Fig. 4. Theoretical model of the integration of perception of public sports space, physical exercise activities, and IoT.
3.4. System Model
(1) Data management platform
Combined with the model in Section 3, the algorithm in this study can be integrated into the intelligent community sports model (Fig. 3) to assist in the real-time recognition of the actions of community sports personnel. The recognition algorithm model is the algorithm described in Sections 3.1–3.3. The Big Data Center of Urban Community Sports Governance was its foundation. The big data center was built to digitize all types of information resources of community sports, collect and store them, and provide data support for the intelligence of community sports governance. The integrated sports governance system, composed of government, planning, financial, and other departments, provides support for community sports governance from many perspectives, such as intelligent decision-making, planning and design, and resource integration. The intelligent service system for urban community sports is at the core of intelligent community sports governance. Meanwhile, the sports needs of community residents can be met by providing accurate community sports services to achieve the coordinated and sustainable development of sports. The structure of the intelligent governance system for urban community sports is shown in Fig. 3.
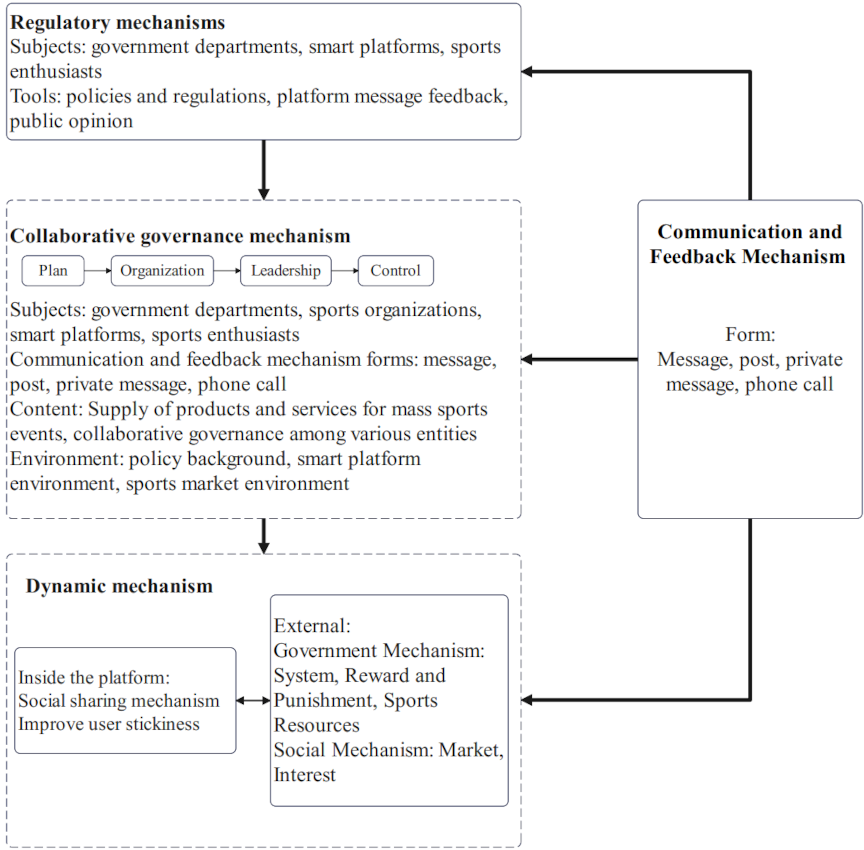
Fig. 5. Model of the operation mechanism of the intelligent sports platform.
Based on socio-ecological models and other relevant theories, this study proposes a theoretical model (Fig. 4) aimed at studying the mediating role of physical exercise between the perception of public sports spaces and health-related quality of life in older adults. Based on the behavioral decision theory, this study explored the moderating effect of IoT technology integration on the relationship between public sports spaces and health.
(2) IoT system model of community sports
Combined with IoT technology, through the information feedback of each subject of the platform, problems are identified by comparison with established goals, and the behaviors of the platform and each subject are constantly adjusted and standardized to provide protection for the rights and interests of sports fans. The communication and feedback mechanism provides support in all aspects of the entire platform operation so that the other three mechanisms can continue to operate through the four functions of planning, organization, leadership, and control, and make changes and adjustments to meet the needs of sports fans for sports products and services. The overall operational mechanism model is illustrated in Fig. 5.
Based on the image data collected by the image sensor, the smart endurance module primarily uses face recognition algorithm based on a serialized feature gradient vector architecture to achieve high-accuracy. The smart sports training module primarily uses human movement recognition technology, collects human bone points based on Microsoft’s Kinect machine vision sensor, and establishes a movement model library to achieve diversified and efficient human movement recognition. The client platform was divided into smart endurance and smart somatosensory platforms. The data interaction of the smart endurance platform uses C\(\texttt{++}\) and socket programming to communicate with the cloud platform in real time. The somatosensory platform achieves efficient communication with the cloud platform using the WPF development client and TCP network protocol. The overall architecture of the platform is shown in Fig. 6.
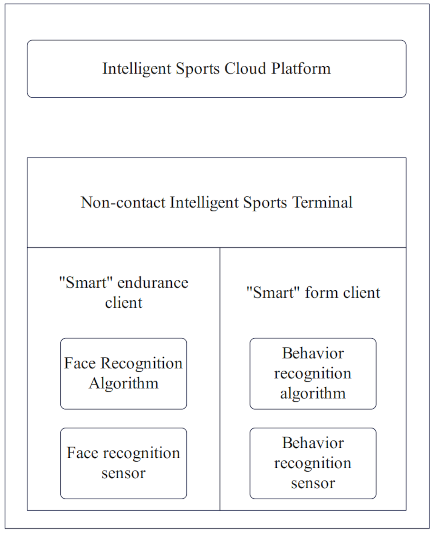
Fig. 6. Architecture of the data collection platform for community sports.
Through this architecture, the integration of the terminal and the cloud can be easily realized. The intelligent endurance module and intelligent somatosensory module use the intermediate service terminal developed in C\(\texttt{++}\) and the client terminal developed in C#, respectively, as the medium. They also use an efficient and secure network communication mechanism to realize the data collection of the platform and mutual communication between hardware and the cloud 30.
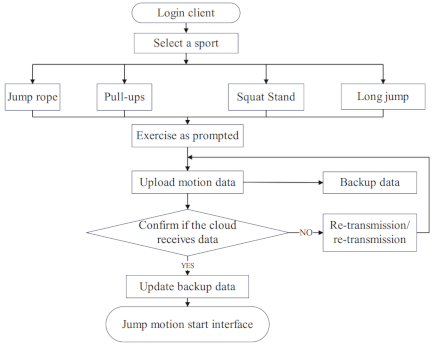
Fig. 7. Flowchart of the somatosensory client.
The human motion recognition client consists of hardware devices, such as sensors, processors, display devices, and cloud servers. Each device has a unique biometric identification code for server permission. After completing the platform initialization, it enters the sports selection stage, where the user selects the sports to be performed. The terminal flowchart is shown in Fig. 7.
4. Experimental Study
4.1. Methods
The datasets used in this experiment were the Sports-1M video dataset, the Sports-700 video motion recognition dataset, the Human3.6M human motion capture dataset, and the NTU RGB\(+\)D motion recognition dataset. The algorithm described in Section 3 was used to identify and count the physical exercise of community residents. In this section, we analyze the effect of the proposed IoT information collection system and verify its effect on community sports management. Experiments on different datasets were divided into a training set and a validation set at a ratio of \(7{:}3\), and the generalization ability of the model was evaluated by cross-analysis. Specifically, the experimental data from different datasets (such as Sports-1M video dataset and Sports-700 video motion recognition dataset) were divided into a training set and a validation set (in a ratio of \(7{:}3\)), and various algorithms (including NB, C4.5 decision trees, RF, KNN, and IM-shapelets algorithms) were used for training and validation. This cross-analysis ensures that the model can stably perform on different datasets, effectively verifying the generalization ability and robustness of the proposed IoT information collection and community sports management systems 31.
In this experiment, 40 participants were invited to collect data on their two-person interaction movements. The 40 participants comprised 26 males and 14 females. Their ages ranged from 15 to 65 years, with heights from 155 cm to 185 cm, and a weight range of up to 90 kg. In this experiment, the five inertial sensor nodes were attached to each subject’s back, left wrist, right wrist, left ankle, and right ankle. The samples in this study were divided into two groups: A and B. The postures of Groups A and B were basically the same when running, dancing, long jumping, and other sports. However, during multi-person confrontation sports (football, basketball, table tennis, etc.), Group A played the active role, and Group B played the passive role.
The comparative algorithms in this study were the NB, C4.5 decision tree, RF, KNN, and IM-shapelets algorithms.
Based on community sports practices, this paper selected football, basketball, billiards, table tennis, hiking, cycling, swimming, rock climbing, jumping rope, long jump, high jump, shot put, sprint, square dance, and tai chi.
In addition, the effect of community sports data processing was verified. A simulation system was constructed on the MATLAB platform, and the data were processed to verify its effectiveness.
In this study, accuracy was used as the main parameter of the evaluation algorithm for action recognition and was combined with the recall rate and F1 score for evaluation.
An ultra-low-power triaxial acceleration sensor (LIS2DH12, STMicroelectronics) was used in this study. It is widely used in wearable devices, smartphones, and industrial automation, features high sensitivity and low noise, and is suitable for community sports identification.
4.2. Results
The multi-dataset test verification is shown in Table 1.
Subsequently, 20 data points were randomly selected from the four datasets to form a new dataset for a further experiment to improve the sports types. The performances of the different algorithms in recognizing single-person atomic actions were evaluated. Tables 2 and 3 show the recognition results of the IM-shapelets-based algorithm and the four traditional recognition algorithms, respectively.
The recognition results of two-person interactive actions were obtained by weight fusion of the recognition results of single-person atomic actions. The KNN algorithm was employed. The optimal weights corresponding to different methods are listed in Table 4.
A feature-layer fusion strategy was considered to fuse the features of the two experimental subjects. The total recognition rates of the NB, C4.5, RF, and KNN algorithms are listed in Table 5.
Table 1. Multi-dataset test verification.

The data-processing system was constructed on the MATLAB platform, and its structure was constructed based on the community sports management model in Section 3.3. The effectiveness of community sports data-processing is verified using MATLAB, which allows users to verify the effect of the system. Management evaluation mainly refers to the statistics of user satisfaction, that is, allowing users to score the use experience of the system. These were subjective evaluation data. The results are listed in Table 6.
Table 2. Recognition results of single-person atomic action (Group A).

Table 3. Recognition results of single-person atomic action (Group B).

4.3. Analysis and Discussion
In Table 1, the model in this study shows the highest recognition rate across different datasets and sports, and the \(p\)-values are less than 0.05, indicating significant differences in the data. Moreover, the results demonstrate that the proposed model has better generalization ability.
By adjusting the values of \(\alpha\) and \(\beta\), we found that the recognition rate of the two-person interaction action reached its highest when \(\alpha=0.7\) and \(\beta=0.3\). This indicates that for specific movements, the actions of experimental subject A contributed more to the interaction results. In contrast, when using fixed weights (such as \(\alpha=0.5\), \(\beta=0.5\)), the recognition rate decreases, which verifies the effectiveness of the weight fusion strategy proposed in this paper.
Combined with the selected sports types, the dimensions of community sports characteristics measured in this study were 15. The recognition results of the Group A data in Table 2 show that the algorithm based on IM-shapelets is superior to the other four traditional recognition algorithms in recognizing most single-person atomic actions. Simultaneously, the recognition rates of football, basketball, table teniss, hiking, swimming, rock climbing, skipping rope, long jump, high jump, shot put, sprint, and tai chi using the IM-shapelets algorithm reached 95%.
The recognition results of the Group B data in Table 3 also show that the algorithm based on IM-shapelets is superior to the other four traditional recognition algorithms in recognizing most single-person atomic actions. Simultaneously, the recognition rates for football, basketball, table tennis, hiking, rock climbing, rope skipping, long jump, high jump, shot put, sprint, square dance, and tai chi using the IM-shapelets algorithm reached 95%.
Analyzing the average recognition accuracy of the IM-shapelets algorithm in Tables 2 and 3, it can be seen that the algorithm in this paper has a higher accuracy rate when identifying the sports data of Group A. This is because the participants in Group A were all enthusiastic about sports. Therefore, the test data from Group A are more professional and easier to match with the standard database.
Table 4. Weights of different identification methods.

Table 5. Comparison between the proposed algorithm and other algorithms.

Table 6. Effect verification of community sports management system.

For the KNN and C4.5 algorithms, Group B plays a more significant role in recognizing interactive actions than Group A. For the RF algorithm, compared with the proposed method, the experimental subject plays a more significant role in identifying interactive actions. As shown in Tables 1 and 2, for the KNN and C4.5 algorithms, the recognition rate of a single atomic action of Group B is higher than that of Group A. For the RF algorithm, the recognition rate of a single atomic action of Group A is higher than that of Group B. Therefore, the actions of Group A are mostly active, while those of Group B are mostly passive, making the KNN and C4.5 algorithms more suitable for group action recognition. The recognition accuracy can be further improved through multi-target action recognition. In recognition, the active group A is identified first, followed by the identification of Group B. If Group B’s response action is consistent with the result predicted by the system, reliable results can be output. For the RF algorithm and the proposed method, it can be judged directly through subject A, making it more active and efficient in recognition.
Table 5 presents the recognition results for the two-person interaction. Table 5 shows that although the recognition rate of the single-person atomic action of Group B is low, the proposed method achieved the highest recognition rate of two-person interaction actions by fusing the recognition results of the single-person atomic actions.
As shown in Table 4, for the KNN algorithm and the algorithm based on IM-shapelets, Group A played a more significant role in identifying interactive actions than Group B. However, for the NB and C4.5 algorithms, Group B played a more significant role in recognizing interactive actions, which may be because the recognition rate of single-person atomic actions of Group B was higher than that of Group A.
Table 5 shows that the proposed algorithm has a higher accuracy in community sports recognition than existing algorithms. Therefore, it has high practical results and can be recognized by the sensors of terminal conduction equipment, which is significant for promoting community sports management. The shapelet model performed the best in terms of accuracy, recall, and F1 score. RF performed well in terms of accuracy, but its recall rate and F1 score were slightly lower than those of the shapelets. The performances of C4.5 and KNN were normal, with all indicators at the medium level. The indicators of NB were relatively low and performed worse than the other models.
Because the research on human movement based on somatosensory networks is mostly aimed at a single movement, and there is a lack of public datasets for two-person interaction movements based on somatosensory networks, this paper compares the proposed method with research on two-person interaction movement recognition based on visual information. Two-person interactive action recognition based on visual information verifies the proposed method on public datasets. However, owing to the lack of public datasets, the data for two-person interactive action recognition in this study comes from self-built datasets.
Table 6 shows that the community sports management system constructed in this study has a high data-processing effect, and the evaluation of the simulation processing of community sports data reached more than 90 points. Therefore, the proposed model has a high user evaluation, meets the needs of community sports data processing, and has certain practical significance for the construction of smart community sports systems.
Overall, data acquisition methods based on visual information are easily affected by factors such as background and occlusion, making motion recognition challenging. However, the data acquisition method based on the somatosensory network is not affected by the surrounding environment. Therefore, the recognition rate of the proposed method is very high. However, action recognition based on visual information can extract features that reflect the relationship between the two in an interaction, such as geometric features and relative attention. In addition, motion recognition based on visual information can improve recognition accuracy by fusing spatiotemporal features. Therefore, this study focused on the extraction of more effective features, particularly those that can reflect the relative relationships between them.
This paper presented a recognition algorithm for two-person interactions based on hierarchical fusion. By decomposing a two-person interaction into a combination of single-person atomic actions, the algorithm can recognize single-person atomic actions and two-person interactions. As a new feature-representation method, the shapelet method was introduced to recognize a single atomic action, and its advantages were verified through experiments. The results also demonstrated that the recognition of interactive actions achieved significant improvements. In addition, considering the long running time of the shapelet method, a hierarchical fusion recognition algorithm based on acceleration signals was proposed. To reduce the running time, a weighted shapelet method based on weights was proposed for the recognition of single atomic actions. Using the fusion strategy, the recognition results of the single-person atomic action were fused again to obtain the recognition results of the two-person interaction actions. Compared to NB, C4.5, RF, KNN, and other common and advanced methods, the proposed IM-shapelets method has the advantage of recognizing a single atomic action. The experimental results also demonstrate that the proposed method is effective for interactive action recognition.
The IM-shapelets algorithm can not only be applied to community sports managementm but is also effective for time-series classification. Because it can identify and extract key patterns in a time series, it is widely used in various fields.
In the field of education, algorithms can analyze student behaviors. By collecting and analyzing students’ learning behavior time-series data (such as login time, learning duration, and interaction frequency), the IM-shapelets algorithm can identify specific behavior patterns and predict learning status or potential problems, providing personalized learning suggestions and interventions. It can also detect exam cheating by analyzing student behavior patterns during the exam (such as answer speed, answer order, and abnormal operations), identify possible cheating, and help educational institutions and exam managers effectively monitor and prevent it.
In the field of healthcare, the algorithm can carry out disease monitoring and prediction. By collecting time-series data of patients’ physiological parameters (such as heart rate, blood pressure, and body temperature), it can identify characteristic patterns before disease onset, enabling early warning and intervention, thereby improving the treatment effects and quality of life of patients. In addition, the modified algorithm can be used to analyze the daily activity data of elderly and chronic patients, evaluate their health status, identify abnormal conditions in a timely manner, and provide corresponding health advice or medical intervention.
This algorithm can also be applied to fault detection and diagnosis of industrial robots by collecting operational data (such as vibration, temperature, current, and other sensor data). The characteristic mode before the fault can be identified to realize fault pre-alarm and preventive maintenance of industrial robots, reducing downtime and maintenance costs. Using this algorithm to analyze the operational data of an industrial robot enables the identification of efficient operational modes to optimize the working process and improve production efficiency and product quality.
The necessity for this method stems from the particularities of group activities in community sports. In multi-person interactive behavior recognition, grouping individuals who perform fuzzy actions and their partners who perform explicit actions into the same category utilizes the principle of “collaborative filtering” in swarm intelligence to infer the potential behavior patterns of associated individuals based on known explicit behaviors. This method is particularly effective when there is a natural correlation between the participants’ actions, because social distance and action synchronization performance provide additional dimensions for behavior recognition. For the connection of individual behavior recognition, the system establishes a mapping matrix between individual behavior and group patterns through prior pairing relationships, allowing the recognition results of group units to be inversely decomposed into individual behavior feature vectors. This hierarchical processing not only maintains the efficiency of group recognition, but also achieves individual behavior analysis through post-period data mining.
In conclusion, the IM-shapelets algorithm has wide application potential in education, healthcare, and industrial robotics. By identifying and extracting key patterns in a time series, the algorithm can help professionals in various fields make more accurate predictions and decisions, improving efficiency and effectiveness.
5. Conclusion
Community sports are regional mass sports activities that are divided into basic units by grassroots streets. They rely on the local natural environment and sports venues to meet the daily fitness needs of the community. Community sports participants include government departments, sports organizations, neighborhood committees, residents, and market entities. Moreover, community sports activities are manifested in developing sports activities, exercise projects, managing the sports industry, and providing sports information. This study combined IoT technology to construct a community sports management system and applied weighted fusion to combine the recognition results of single-person atomic actions. The analysis of the test results shows that the proposed algorithm has higher accuracy in community sports recognition than existing algorithms. Therefore, it has high practical performance and enables action recognition through terminal sensors, which is significant for promoting community sports management.
This study identified the possible limb movements in community sports interactions. People’s emotional expressions in daily communication are complex. Previous studies have shown that in daily communication, people usually exhibit non-basic, subtle, and complex emotional states, such as thinking, embarrassment, or depression. These emotional states can be expressed in the form of facial expressions, body posture, and audio or physiological signals. Therefore, a single label may not reflect the complex emotional states conveyed by a rich source of information. Describing complex emotional states and capturing rich information are worthy of in-depth study. In the future, we plan to integrate an intelligent emotion recognition algorithm based on the improved algorithm to further improve the recognition performance of this model.
- [1] C. Dindorf, E. Bartaguiz, F. Gassmann, and M. Fröhlich, “Conceptual structure and current trends in artificial intelligence, machine learning, and deep learning research in sports: A bibliometric review,” Int. J. of Environmental Research and Public Health, Vol.20, Issue 1, pp. 173-184, 2022. https://doi.org/10.3390/ijerph20010173
- [2] N. H. Nguyen, D. T. A. Nguyen, B. Ma, and J. Hu, “The application of machine learning and deep learning in sport: Predicting NBA players’ performance and popularity,” J. of Information and Telecommunication, Vol.6, Issue 2, pp. 217-235, 2022. https://doi.org/10.1080/24751839.2021.1977066
- [3] F. Fonti, J. M. Ross, and P. Aversa, “Using sports data to advance management research: A review and a guide for future studies,” J. of Management, Vol.49, Issue 1, pp. 325-362, 2023. https://doi.org/10.1177/01492063221117525
- [4] J. Yadav, M. Misra, N. P. Rana, and K. Singh, “Exploring the synergy between nano-influencers and sports community: Behavior mapping through machine learning,” Information Technology & People, Vol.35, Issue 7, pp. 1829-1854, 2022. https://doi.org/10.1108/ITP-03-2021-0219
- [5] M. Rico-González, J. Pino-Ortega, A. Méndez, F. Clemente, and A. Baca, “Machine learning application in soccer: A systematic review,” Biology of Sport, Vol.40, Issue 1, pp. 249-263, 2023. https://doi.org/https://doi.org/10.5114/biolsport.2023.112970
- [6] G. Mingchan, “A strategy for building a smart sports platform based on machine learning models,” 3C TIC, Vol.12, Issue 1, pp. 248-265, 2023. https://doi.org/10.17993/3ctic.2023.121.248-265
- [7] I. Ghosh, S. Ramamurthy, A. Chakma, and N. Roy, “Sports analytics review: Artificial intelligence applications, emerging technologies, and algorithmic perspective,” WIREs: Data Mining and Knowledge Discovery, Vol.13, Issue 5, Article No.e1496, 2023. https://doi.org/10.1002/widm.1496
- [8] M. A. Al-Asadi and S. Tasdemır, “Predict the value of football players using FIFA video game data and machine learning techniques,” IEEE Access, Vol.10, pp. 22631-22645, 2022. https://doi.org/10.1109/ACCESS.2022.3154767
- [9] Y. Chu, G. Knell, R. P. Brayton, S. O. Burkhart, X. Jiang, and S. Shams, “Machine learning to predict sports-related concussion recovery using clinical data,” Annals of Physical and Rehabilitation Medicine, Vol.65, Issue 4, Article No.101626, 2022. https://doi.org/10.1016/j.rehab.2021.101626
- [10] G. Nassis, E. Verhagen, J. Brito, P. Figueiredo, and P. Krustrup, “A review of machine learning applications in soccer with an emphasis on injury risk,” Biology of Sport, Vol.40, Issue 1, pp. 233-239, 2023. https://doi.org/10.5114/biolsport.2023.114283
- [11] J. Yadav, M. Misra, N. P. Rana, K. Singh, and S. Goundar, “Netizens’ behavior towards a blockchain-based esports framework: A TPB and machine learning integrated approach,” Int. J. of Sports Marketing and Sponsorship, Vol.23, Issue 4, pp. 665-683, 2022. https://doi.org/10.1108/IJSMS-06-2021-0130
- [12] P. N. Ramkumar, B. C. Luu, H. S. Haeberle, J. M. Karnuta, B. U. Nwachukwu, and R. J. Williams, “Sports medicine and artificial intelligence: A primer,” The American J. of Sports Medicine, Vol.50, Issue 4, pp. 1166-1174, 2022. https://doi.org/10.1177/03635465211008648
- [13] V. Sarlis, D. Gerakas, and C. Tjortjis, “A data science and sports analytics approach to decode clutch dynamics in the last minutes of NBA games,” Machine Learning and Knowledge Extraction, Vol.6, Issue 3, pp. 2074-2095, 2024. https://doi.org/10.3390/make6030102
- [14] S. Chidambaram, Y. Maheswaran, K. Patel, V. Sounderajah, D. A. Hashimoto, K. P. Seastedt et al., “Using artificial intelligence-enhanced sensing and wearable technology in sports medicine and performance optimisation,” Sensors, Vol.22, Issue 18, Article No.6920, 2022. https://doi.org/10.3390/s22186920
- [15] X. Hua and L. Han, “Design and practical application of sports visualization platform based on tracking algorithm,” Computational Intelligence and Neuroscience, Vol.2022, Issue 1, Article No.4744939, 2022. https://doi.org/10.1155/2022/4744939
- [16] L. Cao, “Design and optimization of a decision support system for sports training based on data mining technology,” Scientific Programming, Vol.2022, Issue 1, Article No.1846345, 2022. https://doi.org/10.1155/2022/1846345
- [17] Y. Yang, J. Koenigstorfer, and T. Pawlowski, “Predicting transfer fees in professional European football before and during COVID-19 using machine learning,” European Sport Management Quarterly, Vol.24, Issue 3, pp. 603-623, 2024. https://doi.org/10.1080/16184742.2022.2153898
- [18] G. S. Bullock, J. Mylott, T. Hughes, K. F. Nicholson, R. D. Riley, and G. S. Collins, “Just how confident can we be in predicting sports injuries? A systematic review of the methodological conduct and performance of existing musculoskeletal injury prediction models in sport,” Sports Medicine, Vol.52, No.10, pp. 2469-2482, 2022. https://doi.org/10.1007/s40279-022-01698-9
- [19] Z. Ye, T. Zhang, C. Wu, Y. Qiao, W. Su, J. Chen et al., “Predicting the objective and subjective clinical outcomes of anterior cruciate ligament reconstruction: A machine learning analysis of 432 patients,” The American J. of Sports Medicine, Vol.50, Issue 14, pp. 3786-3795, 2022. https://doi.org/10.1177/03635465221129870
- [20] D. Liu, “Design of data mining system for sports training biochemical indicators based on artificial intelligence and association rules,” Int. J. of Data Mining and Bioinformatics, Vol.28, Nos.3-4, pp. 236-256, 2024. https://doi.org/10.1504/ijdmb.2024.139449
- [21] S. Kewei, V. G. Díaz, and S. N. Kadry, “Evaluating the efficiency of student sports training based on supervised learning,” Int. J. of Technology and Human Interaction, Vol.18, Issue 2, pp. 1-17, 2022. https://doi.org/10.4018/IJTHI.313427
- [22] I. G. McHale and B. Holmes, “Estimating transfer fees of professional footballers using advanced performance metrics and machine learning,” European J. of Operational Research, Vol.306, Issue 1, pp. 389-399, 2023. https://doi.org/10.1016/j.ejor.2022.06.033
- [23] J. Tong and F. Wang, “Basketball sports posture recognition technology based on improved graph convolutional neural network,” J. Adv. Comput. Intell. Intell. Inform., Vol.28, No.3, pp. 552-561, 2024. https://doi.org/10.20965/jaciii.2024.p0552
- [24] F. Xu, P. Shi, and X. Zhang, “Skeleton-based human action recognition with spatial and temporal attention-enhanced graph convolution networks,” J. Adv. Comput. Intell. Intell. Inform., Vol.28, No.6, 2024. https://doi.org/10.20965/jaciii.2024.p1367
- [25] M. S. Ibrahim, S. Muralidharan, Z. Deng, A. Vahdat, and G. Mori, “A hierarchical deep temporal model for group activity recognition,” Proc. of the IEEE Conf. on Computer Vision and Pattern Recognition, pp. 1971-1980, 2016. https://doi.org/10.1109/CVPR.2016.217
- [26] Z. Deng, A. Vahdat, H. Hu, and G. Mori, “Structure inference machines: Recurrent neural networks for analyzing relations in group activity recognition,” Proc. of the IEEE Conf. on Computer Vision and Pattern Recognition, pp. 4772-4781, 2016. https://doi.org/10.1109/CVPR.2016.516
- [27] T. Bagautdinov, A. Alahi, F. Fleuret, P. Fua, and S. Savarese, “Social scene understanding: End-to-end multi-person action localization and collective activity recognition,” Proc. of the IEEE Conf. on Computer Vision and Pattern Recognition, pp. 3425-3434, 2017. https://doi.ieeecomputersociety.org/10.1109/CVPR.2017.365
- [28] T. Shu, S. Todorovic, and S.-C. Zhu, “CERN: Confidence-energy recurrent network for group activity recognition,” Proc. of the IEEE Conf. on Computer Vision and Pattern Recognition, pp. 4255-4263, 2017. https://doi.org/10.1109/CVPR.2017.453
- [29] M. S. Ibrahim and G. Mori, “Hierarchical relational networks for group activity recognition and retrieval,” Proc. of the European Conf. on Computer Vision, pp. 721-736, 2018. https://doi.org/10.1007/978-3-030-01219-9_44
- [30] D. Gordon, M. Scholz, and M. Beigl, “Group activity recognition using belief propagation for wearable devices,” Proc. of the 2014 ACM Int. Symp. on Wearable Computers, pp. 3-10, 2014. https://doi.org/10.1145/2634317.2634329
- [31] R. Montoliu, R. Martín-Félez, J. Torres-Sospedra, and A. Martínez-Usó, “Team activity recognition in Association Football using a Bag-of-Words-based method,” Human Movement Science, Vol.41, pp. 165-178, 2015. https://doi.org/10.1016/j.humov.2015.03.007
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.