Research Paper:
Posture Estimation and Obstacle Detection by Embedding Distance-Measuring Sensors in a Spherical Mobile Robot
Ryota Nakagawa*,† and Yuki Ueno**

*Graduate School of Engineering, Tokyo University of Technology
1404-1 Katakuramachi, Hachioji, Tokyo 192-0982, Japan
†Corresponding author
**Department of Mechanical Engineering, Tokyo University of Technology
1404-1 Katakuramachi, Hachioji, Tokyo 192-0982, Japan

In this study, we developed a method for designing spherical mobile robots that can detect obstacles and can estimate posture using embedded laser-ranging sensors in a spherical shell. A mobile robot used in commercial facilities must be safe for humans, and must also be able to detect and avoid obstacles. Spherical mobile robots are considered suitable for such purposes as operating near humans. However, the installation of external measurement sensors in spherical mobile robots can reduce their mobility. In this study, we developed a novel installation method for embedding external laser-ranging measurement sensors in a spherical shell. This method can successfully install sensors without compromising on the capability such as mobile characteristics of the robot. In addition, we proposed a posture estimation method using embedded laser-ranging sensors only. Moreover, we proposed a method for classifying point-cloud data into floors or obstacles. The validity of these methods was verified by simulations, which demonstrated that the methods could detect obstacles and estimate the robot’s posture, even in the presence of sensor noise.
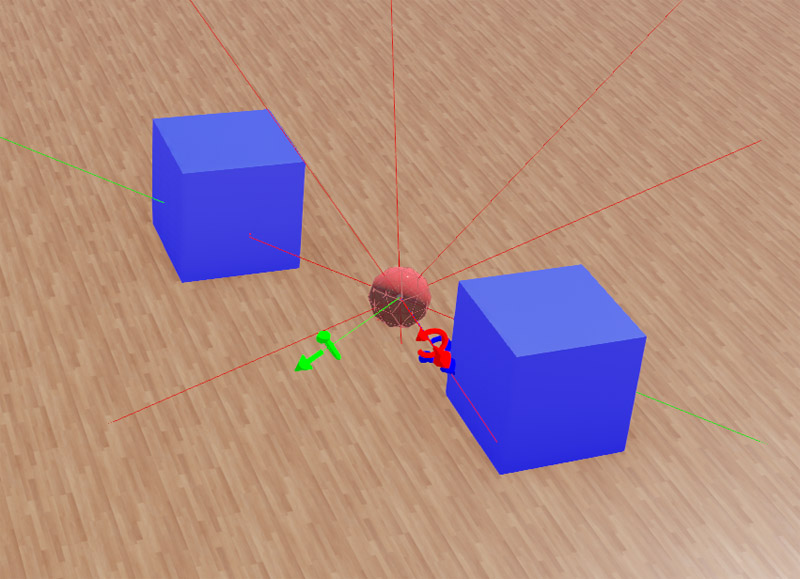
Obstacle detection by a spherical robot
- [1] S. Kamiyama, “The super aged society: Japan’s the kaiteki institute studies how to keep the elderly healthy and active,” IEEE Pulse, Vol.5, No.2, pp. 59-63, 2014. https://doi.org/10.1109/MPUL.2013.2296805
- [2] United Nations Population Division, “WORLD POPULATION AGEING: 1950-2050,” 2002.
- [3] R. Pinillos, S. Marcos, R. Feliz, E. Zalama, and J. Gómez-García-Bermejo, “Long-term assessment of a service robot in a hotel environment,” Robotics and Autonomous Systems, Vol.79, pp. 40-57, 2016. https://doi.org/10.1016/j.robot.2016.01.014
- [4] G. Trovato, A. Lopez, R. Paredes, and F. Cuellar, “Security and guidance: Two roles for a humanoid robot in an interaction experiment,” Proc. of IEEE Int. Symp. on Robot and Human Interactive Communication (RO-MAN), pp. 230-235, 2017. https://doi.org/10.1109/ROMAN.2017.8172307
- [5] Nihon Keizai Shimbun, “Fuji Keizai Announces Survey Results on the Domestic Market for Autonomous Mobile Robots and Robot Integration Platforms,” 2025 (in Japanese). https://t21.nikkei.co.jp/g3/CMNDF11.do [Accessed June 5, 2025]
- [6] M. Seeman, M. Broxvall, A. Saffiotti, and P. Wide, “An autonomous spherical robot for security tasks,” Proc. of IEEE Int. Conf. on Computational Intelligence for Homeland Security and Personal Safety, pp. 51-55, 2006. https://doi.org/10.1109/CIHSPS.2006.313312
- [7] B. B. Dey and M. Jenkin, “Spherico: rapid prototyping a spherical robot,” Proc. of IEEE Int. Conf. on Information and Automation (ICIA), pp. 957-962, 2018. https://doi.org/10.1109/ICInfA.2018.8812351
- [8] J. A. V. Alves and J. Dias, “Design and control of a spherical mobile robot,” Proc. of the Institution of Mechanical Engineers, Part I: J. of Systems and Control Engineering, Vol.217, pp. 457-467, 2003. https://doi.org/10.1177/095965180321700602
- [9] R. Sadeghian, M. Zarei, S. Shahin, and M. T. Masouleh, “Vision based control and simulation of a spherical rolling robot based on ROS and gazebo,” Proc. of IEEE Int. Conf. on Knowledge-Based Engineering and Innovation (KBEI), pp. 304-309, 2017. https://doi.org/10.1109/KBEI.2017.8324991
- [10] Y. Ueno, A. Imatomi, M. Masuda, and Y. Matsuo, “Mechanism and Control of Spherical Mobile robot with 3-wheel omni-directional mobile internal unit,” J. of the Robotics Society of Japan, Vol.40, No.3, pp. 231-239, 2022 (in Japanese). https://doi.org/10.7210/jrsj.40.231
- [11] R. Sadeghian and M. T. Masouleh, “Controller tuning based on optimization algorithms of a novel spherical rolling robot,” J. of Mechanical Science and Technology, Vol.30, No.11, pp. 5207-5216, 2016. https://doi.org/10.1007/s12206-016-1038-0
- [12] H. Hasegawa, Y. Ando, and M. Mizukawa, “Development of spherical autonomous mobile robot,” Proc. of Robotics and Mechatronics Conf., 1A1-D25, 2006 (in Japanese). https://doi.org/10.1299/jsmermd.2006._1A1-D25_1
- [13] Y. Watanabe and K. Okumura, “Development of omni-directional mobile spherical camera robot: Development of robot moving mechanism,” Proc. of the Conf. of the Japan Society of Mechanical Engineers Kyushu Branch, Vol.2007.60, pp. 239-240, 2007 (in Japanese). https://doi.org/10.1299/jsmekyushu.2007.60.239
- [14] K. Matsuo, H. Satou, T. Makabe, I. Yanokura, K. Kojima, K. Okada, and M. Inaba, “Configuration and behavior realization of a spherical robot equipped with a wireless power supply sensor arm that can be attached and detached using magnets,” Proc. of Robotics and Mechatronics Conf., 2P2-G16, 2023 (in Japanese). https://doi.org/10.1299/jsmermd.2023.2P2-G16
- [15] M. A. Fischler and R. C. Bolles, “Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography,” Commun. ACM, Vol.24, No.6, pp. 381-395, 1981. https://doi.org/10.1145/358669.358692
- [16] R. Raguram, O. Chum, M. Pollefeys, J. Matas, and J.-M. Frahm, “USAC: A universal framework for random sample consensus,” IEEE Trans. on Pattern Analysis and Machine Intelligence, Vol.35, No.8, pp. 2022-2038, 2013. https://doi.org/10.1109/TPAMI.2012.257
- [17] K. Klasing, D. Althoff, D. Wollherr, and M. Buss, “Comparison of surface normal estimation methods for range sensing applications,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 3206-3211, 2009. https://doi.org/10.1109/ROBOT.2009.5152493
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.