Research Paper:
Static Output Feedback Controller Design for Switching Polynomial Fuzzy Time-Varying Delay System
Xiang Wang
 , Lizhen Li†
, and Yutang Wu
, Lizhen Li†
, and Yutang Wu
College of Mathematics and Physics, Shanghai University of Electric Power
No.1851 Hucheng Ring Road, Pudong New Area, Shanghai 201306, China
†Corresponding author

This study focuses on the stability and stabilization problems of a switching polynomial fuzzy system with a time-varying delay. The switching method is based on the operating sub-domains, and the switching polynomial Lyapunov function with a time-varying delay is used to design the switching polynomial static output feedback controller. The switching polynomial Lyapunov function contains a double-integral term for analyzing the upper bound of the time-varying delay. The stabilization of the polynomial system is investigated, using the boundary information of the membership functions and introducing slack polynomial matrices, which can reduce the conservatism of the stability conditions. Subsequently, the sum of squares conditions are obtained, which are convex and can be solved using SOSTOOLS. Finally, the viability and validity of the proposed approach are demonstrated using a numerical example.
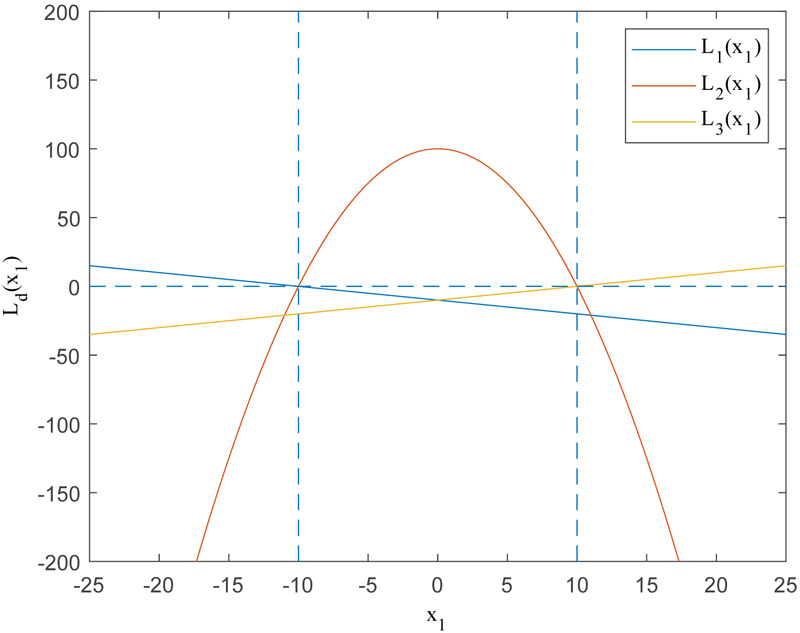
A switching method based on the operating sub-domains
- [1] T. Takagi and M. Sugeno, “Fuzzy identification of systems and its applications to modeling and control,” IEEE Trans. Syst. Man Cybern., Vol.SMC-15, No.1, pp. 116-132, 1985. https://doi.org/10.1109/TSMC.1985.6313399
- [2] M. Sugeno and G. T. Kang, “Structure identification of fuzzy model,” Fuzzy Sets Syst., Vol.28, No.1, pp. 15-33, 1988. https://doi.org/10.1016/0165-0114(88)90113-3
- [3] K. Tanaka, H. Yoshida, H. Ohtake, and H. O. Wang, “A sum-of-squares approach to modeling and control of nonlinear dynamical systems with polynomial fuzzy systems,” IEEE Trans. Fuzzy Syst., Vol.17, No.4, pp. 911-922, 2009. https://doi.org/10.1109/tfuzz.2008.924341
- [4] K. Tanaka, M. Tanaka, Y.-J. Chen, and H. O. Wang, “A new sum-of-squares design framework for robust control of polynomial fuzzy systems with uncertainties,” IEEE Trans. Fuzzy Syst., Vol.24, No.1, pp. 94-110, 2016. https://doi.org/10.1109/tfuzz.2015.2426719
- [5] H. Ohtake, K. Tanaka, and H. O. Wang, “Switching fuzzy controller design based on switching Lyapunov function for a class of nonlinear systems,” IEEE Trans. Syst. Man Cybern., Part B (Cybern.), Vol.36, No.1, pp. 13-23, 2006. https://doi.org/10.1109/tsmcb.2005.852473
- [6] W.-J. Wang, Y.-J. Chen, and C.-H. Sun, “Relaxed stabilization criteria for discrete-time T–S fuzzy control systems based on a switching fuzzy model and piecewise Lyapunov function,” IEEE Trans. Syst. Man Cybern., Part B (Cybern.), Vol.37, No.3, pp. 551-559, 2007. https://doi.org/10.1109/TSMCB.2006.887434
- [7] H. K. Lam, M. Narimani, H. Li, and H. Liu, “Stability analysis of polynomial-fuzzy-model-based control systems using switching polynomial Lyapunov function,” IEEE Trans. Fuzzy Syst., Vol.21, No.5, pp. 800-813, 2013. https://doi.org/10.1109/tfuzz.2012.2230005
- [8] M. Feng and C. J. Harris, “Piecewise Lyapunov stability conditions of fuzzy systems,” IEEE Trans. Syst. Man Cybern., Part B (Cybern.), Vol.31, No.2, pp. 259-262, 2001. https://doi.org/10.1109/3477.915350
- [9] G. Feng, “H∞ controller design of fuzzy dynamic systems based on piecewise Lyapunov functions,” IEEE Trans. Syst. Man Cybern., Part B (Cybern.), Vol.34, No.1, pp. 283-292, 2004. https://doi.org/10.1109/TSMCB.2003.811500
- [10] C.-S. Tseng and Y.-Y. Chen, “A SVD approach to H∞ decentralized static output feedback fuzzy control design for nonlinear interconnected systems,” 2011 IEEE Int. Conf. Fuzzy Syst., pp. 1312-1319, 2011. https://doi.org/10.1109/FUZZY.2011.6007332
- [11] Q. Zhou, S. Fei, and R. Wang, “Static output feedback control for switched linear systems via state-dependent switching,” Proc. 32nd Chin. Control Conf., pp. 2042-2046, 2013.
- [12] R. Chaibi, I. Er Rachid, E. H. Tissir, A. Hmamed, and F. Tadeo, “Static output feedback control of polynomial Takagi-Sugeno systems using a sum of squares approach,” 2019 8th Int. Conf. Syst. Control, pp. 309-314, 2019. https://doi.org/10.1109/ICSC47195.2019.8950588
- [13] A. Chibani, M. Chadli, and N. B. Braiek, “A sum of squares approach for the polynomial output feedback control of nonlinear systems,” 2017 Int. Conf. Adv. Syst. Electr. Technol., pp. 188-193, 2017. https://doi.org/10.1109/ASET.2017.7983689
- [14] H. K. Lam and H. Li, “Output-feedback tracking control for polynomial fuzzy-model-based control systems,” IEEE Trans. Ind. Electron., Vol.60, No.12, pp. 5830-5840, 2013. https://doi.org/10.1109/tie.2012.2229679
- [15] L. Fu, H. K. Lam, F. Liu, B. Xiao, and Z. Zhong, “Static output-feedback tracking control for positive polynomial fuzzy systems,” IEEE Trans. Fuzzy Syst., Vol.30, No.6, pp. 1722-1733, 2022. https://doi.org/10.1109/TFUZZ.2021.3065521
- [16] A. Meng, H.-K. Lam, Y. Yu, X. Li, and F. Liu, “Static output feedback stabilization of positive polynomial fuzzy systems,” IEEE Trans. Fuzzy Syst., Vol.26, No.3, pp. 1600-1612, 2018. https://doi.org/10.1109/TFUZZ.2017.2736964
- [17] I. I. Ammar, H. Gassara, A. El Hajjaji, and M. Chaabane, “Polynomial dynamic output-feedback controllers for positive polynomial fuzzy systems with time delay,” Int. J. Control Autom. Syst., Vol.20, No.8, pp. 2554-2568, 2022. https://doi.org/10.1007/s12555-020-0937-0
- [18] L. Li, H. Xia, Q. Zhu, Y. Wang, and C. Wang, “Stability and stabilization of polynomial fuzzy time-delay systems under imperfect premise matching,” 2016 IEEE Int. Conf. Syst. Man Cybern., pp. 4634-4639, 2016. https://doi.org/10.1109/SMC.2016.7844962
- [19] J. Yu, Q. Li, J. Wang, and C. Han, “Polynomial observer design for time-delay polynomial fuzzy system by sum of squares approach,” 2017 36th Chin. Control Conf., pp. 6397-6402, 2017. https://doi.org/10.23919/ChiCC.2017.8028372
- [20] W. Li and W. Wang, “Guaranteed cost control for polynomial fuzzy time delay systems by sum-of-squares approach,” Proc. 10th World Congr. Intell. Control and Autom., pp. 1806-1811, 2012. https://doi.org/10.1109/WCICA.2012.6358170
- [21] X. Li and K. Merhan, “Model-based control and stability analysis of discrete-time polynomial fuzzy systems with time delay and positivity constraints,” IEEE Trans. Fuzzy Syst., Vol.27, No.11, pp. 2090-2100, 2019. https://doi.org/10.1109/TFUZZ.2019.2893344
- [22] F. Zhang, L. Li, and W. Wang, “Stability and stabilization for a class of polynomial discrete fuzzy systems with time delay by sum-of-squares optimization,” 2011 8th Int. Conf. Fuzzy Syst. Knowl. Discov., pp. 713-717, 2011. https://doi.org/10.1109/FSKD.2011.6019677
- [23] M. Liu, Y. He, and L. Jiang, “A sufficient condition on polynomial inequalities and its application to interval time-varying delay systems,” J. Adv. Comput. Intell. Intell. Inform., Vol.27, No.4, pp. 683-690, 2023. https://doi.org/10.20965/jaciii.2023.p0683
- [24] H. Han and T. Tanaka, “A time-delay-dependent approach for a class of T-S fuzzy models with time delays and uncertainties,” J. Adv. Comput. Intell. Intell. Inform., Vol.16, No.6, pp. 748-757, 2012. https://doi.org/10.20965/jaciii.2012.p0748
- [25] F. Liu, M. Wu, D. Li, Y. He, and R. Yokoyama, “Robust H∞ damping control of Multi-FACTS devices for stability enhancement of power systems with signal’s time delay,” J. Adv. Comput. Intell. Intell. Inform., Vol.19, No.2, pp. 239-246, 2015. https://doi.org/10.20965/jaciii.2015.p0239
- [26] S.-H. Tsai and C.-Y. Jen, “H∞ stabilization for polynomial fuzzy time-delay system: A sum-of-squares approach,” IEEE Trans. Fuzzy Syst., Vol.26, No.6, pp. 3630-3644, 2018. https://doi.org/10.1109/TFUZZ.2018.2841373
- [27] H. K. Lam and M. Narimani, “Stability analysis and performance design for fuzzy-model-based control system under imperfect premise matching,” IEEE Trans. Fuzzy Syst., Vol.17, No.4, pp. 949-961, 2009. https://doi.org/10.1109/TFUZZ.2008.928600
- [28] A. Sala and C. Ariño, “Relaxed stability and performance LMI conditions for Takagi–Sugeno fuzzy systems with polynomial constraints on membership function shapes,” IEEE Trans. Fuzzy Syst., Vol.16, No.5, pp. 1328-1336, 2008. https://doi.org/10.1109/TFUZZ.2008.926585
- [29] S. Prajna, A. Papachristodoulou, and P. A. Parrilo, “Introducing SOSTOOLS: A general purpose sum of squares programming solver,” Proc. 41st IEEE Conf. Decis. Control, Vol.1, pp. 741-746, 2002. https://doi.org/10.1109/CDC.2002.1184594
- [30] A. Papachristodoulou et al., “SOSTOOLS Version 3.00 sum of squares optimization toolbox for MATLAB,” arXiv:1310.4716, 2013. https://doi.org/10.48550/arXiv.1310.4716
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.