Research Paper:
Selecting Pedal Load for Lower-Limb Rehabilitation Based on the Combination of Muscle Synergy and Fourier Series
Shigeki Kuroda*1, Jinhua She*1,†
 , Sota Nakamuro*2, Rennong Wang*1, Daisuke Chugo*3
, Keio Ishiguro*4, Hiromi Sakai*4, and Hiroshi Hashimoto*5
, Sota Nakamuro*2, Rennong Wang*1, Daisuke Chugo*3
, Keio Ishiguro*4, Hiromi Sakai*4, and Hiroshi Hashimoto*5
*1Graduate School of Engineering, Tokyo University of Technology
1404-1 Katakura, Hachioji, Tokyo 192-0982, Japan
†Corresponding author
*2School of Engineering, Tokyo University of Technology
1404-1 Katakura, Hachioji, Tokyo 192-0982, Japan
*3School of Engineering, Kwansei Gakuin University
1 Gakuen-Uegahara, Sanda, Hyogo 669-1337, Japan
*4School of Health Sciences, Tokyo University of Technology
5-23-22 Nishikamata, Ota-ku, Tokyo 144-8535, Japan
*5Advanced Institute of Industrial Technology
1-10-40 Higashiooi, Shinagawa-ku, Tokyo 140-0011, Japan

This paper introduces a new lower-limb rehabilitation machine that meets the rehabilitation needs of hemiplegic patients. First, a left–right independent rotary pedal mechanism was selected to facilitate rehabilitation and adapt to the user’s physical condition. Then, a half model of the lower-limb rehabilitation machine is designed and manufactured with ergonomics in mind. As analytical tools, we combine non-negative matrix factorization and non-negative double singular value decomposition to calculate muscle synergy of the walking muscle surface electromyography (sEMG) signal, and use cosine similarity to evaluate the similarity between walking and pedaling activities. By comparing the results of the walking and pedaling experiments, the effectiveness of pedaling in gait rehabilitation is revealed. To further improve the similarity between walking and pedaling, double integration of the sEMG signal is introduced, and the relationship between load input and rotation angle is described for the first time using Fourier series. The results of the experiment confirmed that more than half of the 10 subjects performed pedaling exercises similar to walking using Fourier series loading compared to pedaling exercises with normal constant loading. This loading parameter may have the potential to improve rehabilitation efficiency for many subjects compared to the usual exercise.
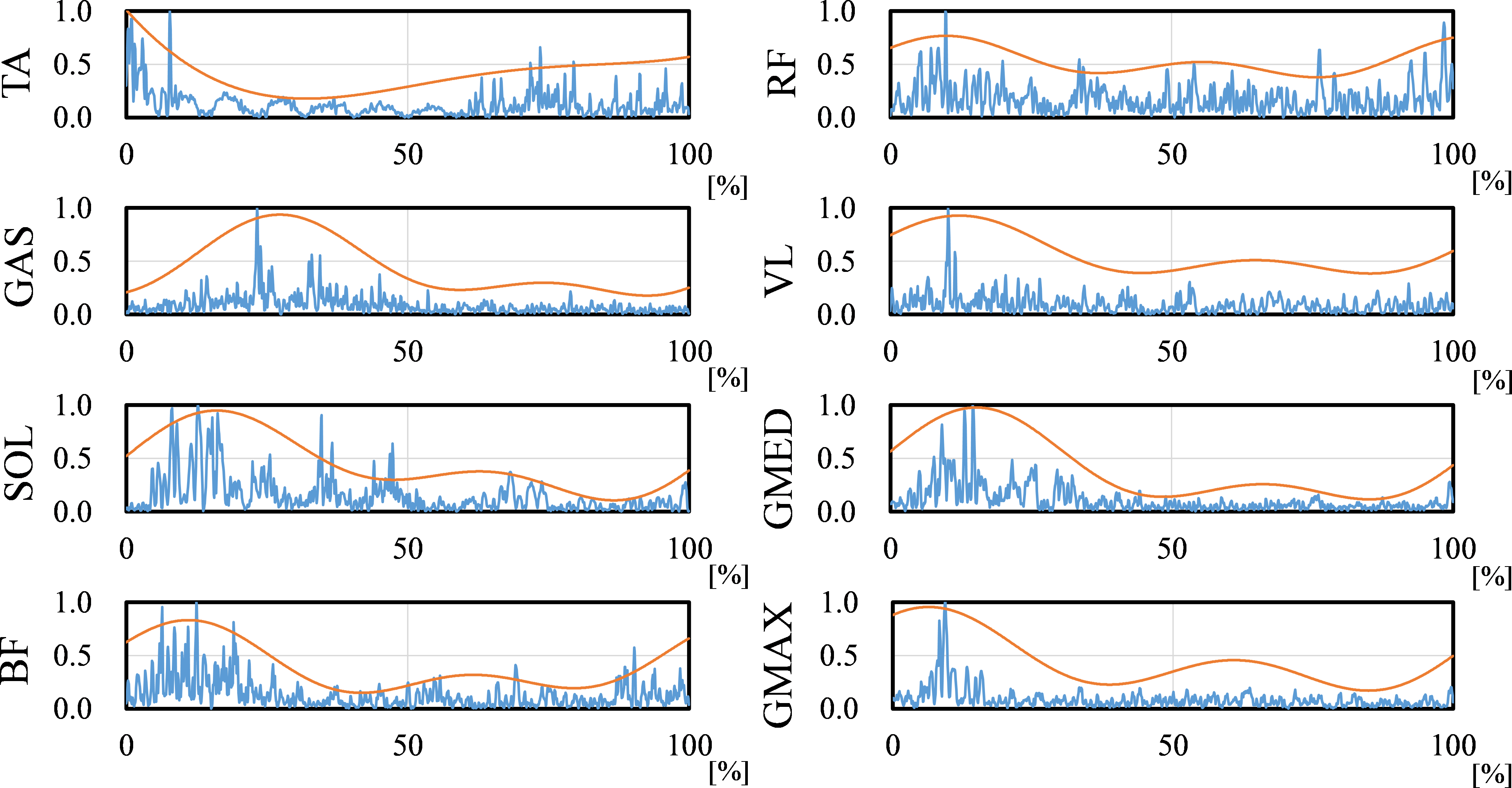
Double integrals and approximations of sEMGs
- [1] Ministry of Health, Labour and Welfare, “Statistics on Actual Nursing Care Benefit Expenses.” (in Japanese) https://www.mhlw.go.jp/toukei/list/45-1b.html [Accessed January 18, 2024]
- [2] K. Yamaguchi, Y. Makihara, and M. Kono, “Rehabilitation professionals for the aging society in Japan: Their scopes of work and related health policies and systems,” J. Natl. Inst. Public Health, Vol.71, No.1, pp. 35-44, 2022. https://doi.org/10.20683/jniph.71.1_35
- [3] S. A. Dugan, “Exercise in the Rehabilitation of the Athlete,” W. R. Frontera, S. A. Herring, L. J. Micheli, and J. K. Silver (Eds.), “Clinical Sports Medicine: Medical Management and Rehabilitation,” pp. 227-235, 2007. https://doi.org/10.1016/B978-141602443-9.50020-9
- [4] K. Hase and M. Dorjravdan, “Basic Viewpoint and Procedure of Gait Analysis,” The Japanese J. of Rehabilitation Medicine, Vol.58, No.2, pp. 114-120, 2021 (in Japanese). https://doi.org/10.2490/jjrmc.58.114
- [5] S. Ueda, “Rehabilitation Medicine Illustrated (2nd Ed.),” The University of Tokyo Press, p. 28, 2002 (in Japanese).
- [6] Y. Ehara, T. Kubota, T. Tsuchiya, T. Nosaka, and S. Yamamoto, “Biomechanics of Lower Limb Orthotics: Basic Mechanics of Hemiplegic Walking and Orthotics,” Ishiyakusyuppan Corporation, p. 7, 2004.
- [7] K. Götz-Neumann, “Gait analysis by observation,” Igakusyoin Corporation, p. 54, p. 72, 2006.
- [8] J.-H. She, Y. Ohyama, and H. Kobayashi, “Master–Slave Electric Cart Control System for Maintaining/Improving Physical Strength,” IEEE Trans. on Robotics, Vol.22, No.3, pp. 481-490, 2006. https://doi.org/10.1109/TRO.2006.870631
- [9] J. She, Y. Ohyama, M. Wu, and H. Hashimoto, “Development of electric cart for improving walking ability—application of control theory to assistive technology,” Science China Information Sciences, Vol.60, Article No.123201, 2017. https://doi.org/10.1007/s11432-017-9261-1
- [10] J. She, F. Wu, T. Mita, H. Hashimoto, M. Wu, and A. M. Iliyasu, “Design of a New Lower-Limb Rehabilitation Machine,” J. Adv. Comput. Intell. Intell. Inform., Vol.21, No.3, pp. 409-416, 2017. https://doi.org/10.20965/jaciii.2017.p0409
- [11] S. Kuroda, J. She, R. Wang, D. Chugo, K. Ishiguro, H. Sakai, and H. Hashimoto, “Design of a Left-Right-Independent Pedaling Machine for Lower-Limb Rehabilitation,” Proc. of the 8th Int. Workshop on Advanced Computational Intelligence and Intelligent Informatics (IWACIII 2023), pp. 343-350, 2023. https://doi.org/10.1007/978-981-99-7593-8_29
- [12] M. Sato, “Handbook of ergonomic standards, numerical values, and formulas (Ningen Kougaku Kijun Suuchi Suushiki Binran),” Gihodo Shuppan, pp. 66-67, pp. 204-205, 1994.
- [13] B. E. Ainswrth, W. L. Haskell, S. D. Herrmann et al., “2011 Compendium of Physical Activities: A Second Update of Codes and MET Values,” Medicine and Science in Sports and Exercise, Vol.43, No.8, pp. 1575-1581, 2011. https://doi.org/10.1249/mss.0b013e31821ece12
- [14] Ministry of Health, Labour and Welfare, “Report of the Study Group on Revision of Exercise Standards and Guidelines.” (in Japanese) https://e-kennet.mhlw.go.jp/wp/wp-content/themes/targis_mhlw/pdf/mets.pdf [Accessed January 18, 2024]
- [15] Toyo Corp., “General-purpose type HB series.” (in Japanese) https://www.toyo.co.jp/mecha/products/detail/HB.html [Accessed January 18, 2024]
- [16] Kyowa Electronic Instruments Co. Ltd., “LPR-C Thin Pedal Force Transducer.” https://www.kyowa-ei.com/eng/product/category/sensors/lpr-c/index.html [Accessed January 18, 2024]
- [17] M. Makikawa, M. Yoshida, M. Nanbu, N. Shiozawa, and S. Okada, “Measurement technologies of mind and body condition in daily life for the development of human friendly products (1st Ed.),” Corona Publishing Co., Ltd., pp. 94-96, 2010.
- [18] T. Kuzuka, T. Masuda, T. Kiryu, and T. Sadoyama, “Biomechanism Library Practical Usage of Surface Electromyogram (1st Ed.),” Tokyo Denki University Press, pp. 1-8, p. 24, pp. 40-46, 2018.
- [19] D. Kushida, T. Kanazawa, and A. Kitamura, “Construction of Lower Limbs Rehabilitation System Based on Bodily Features and EMG,” IEEJ Trans. on Electronics, Information and Systems, Vol.130, No.7, pp. 1132-1138, 2010 (in Japanese). https://doi.org/10.1541/ieejeiss.130.1132
- [20] M. Kozawa, S. Murata, K. Madoba et al., “Comparison of Gait Parameters and Lower-Limb Muscle Activity Between the Optimum and Maximum Gait Velocities,” Japanese J. of Health Promotion and Physical Therapy, Vol.5, No.4, pp. 179-183, 2016 (in Japanese). https://doi.org/10.9759/hppt.5.179
- [21] S. Murata, Y. Kai, T. Abiko, and H. Iwase, “Kinematic Analysis of the Balance Walking Test,” Japanese J. of Health Promotion and Physical Therapy, Vol.7, No.1, pp. 1-5, 2017 (in Japanese). https://doi.org/10.9759/hppt.7.1
- [22] M. Sakamoto, S. Murata, M. Kozawa et al., “Characteristics of Gait Parameters and Muscle Activity during Backward Gait—A Study Involving Healthy Adults—,” Japanese J. of Health Promotion and Physical Therapy, Vol.5, No.4, pp. 185-189, 2016 (in Japanese). https://doi.org/10.9759/hppt.5.185
- [23] T. Tsuji, K. Shima, and Y. Murakami, “Pattern Classification of Combined Motions Based on Muscle Synergy Theory,” J. of the Robotics Society of Japan, Vol.28, No.5, pp. 606-613, 2010 (in Japanese). https://doi.org/10.7210/jrsj.28.606
- [24] T. Takei, J. Confais, S. Tomatsu, and K. Seki, “Neural basis for hand muscle synergies in the primate spinal cord,” PNAS, Vol.114, No.32, pp. 8643-8648, 2017. https://doi.org/10.1073/pnas.1704328114
- [25] T. Oya, “Muscle Synergies—Conception and Development, and the Known and Unknown,” J. of the Robotics Society of Japan, Vol.35, No.7, pp. 506-511, 2017 (in Japanese). https://doi.org/10.7210/jrsj.35.506
- [26] K. Seki, “Muscle synergy and neural mechanisms for its control,” J. of the Society of Instrument and Control Engineers, Vol.61, No.4, pp. 282-287, 2022 (in Japanese). https://doi.org/10.11499/sicejl.61.282
- [27] D. D. Lee and H. S. Seung, “Learning the parts of objects by non-negative matrix factorization,” Nature, Vol.401, pp. 788-791, 1999. https://doi.org/10.1038/44565
- [28] M. W. Berry, M. Browne, A. N. Langvelle, A. P. Pauca, and R. J. Plemmons, “Algorithms and applications for approximate nonnegative matrix factorization,” Computational Statistics and Data Analysis, Vol.52, Issue 1, pp. 155-173, 2007. https://doi.org/10.1016/j.csda.2006.11.006
- [29] H. Kameoka, “Non-Negative Matrix Factorization,” J. of the Society of Instrument and Control Engineers, Vol.51, No.9, pp. 835-844, 2012 (in Japanese). https://doi.org/10.11499/sicejl.51.835
- [30] N. A. Turpin, S. Uriac, and G. Dalleau, “How to improve the muscle synergy analysis methodology?,” Eur. J. Appl. Physiol., Vol.121, No.4, pp. 1009-1025, 2021. https://doi.org/10.1007/s00421-021-04604-9
- [31] T. Aoinishi, R. Maruyama, and H. Miyakawa, “Automatic Cell Detection from Calcium Image Data by Non-Negative Matrix Factorization,” Biophysical (Seibutsu Butsuri), Vol.57, No.1, pp. 36-39, 2017 (in Japanese). https://doi.org/10.2142/biophys.57.036
- [32] H. Kameoka, “Non-Negative Matrix Factorization and its Variants with Applications to Audio Signal Processing,” J. of the Japan Statistical Society, Japanese Issue, Vol.44, Issue 2, pp. 383-407, 2015 (in Japanese). https://doi.org/10.11329/jjssj.44.383
- [33] T. Funato and S. Aoi, “The Method and Application of Synergy Analysis,” J. of the Society of Instrument and Control Engineers, Vol.56, No.3, pp. 193-198, 2017 (in Japanese). https://doi.org/10.11499/sicejl.56.193
- [34] C. Boutsidis and E. Gallopoulos, “SVD based initialization: A head start for nonnegative matrix factorization,” Pattern Recognition, Vol.41, Issue 4, pp. 1350-1362, 2008. https://doi.org/10.1016/j.patcog.2007.09.010
- [35] N. Mehrabi, M. H. Schwartz, and K. M. Steele, “Can altered muscle synergies control unimpaired gait?,” J. of Biomechanics, Vol.90, pp. 84-91, 2019. https://doi.org/10.1016/j.jbiomech.2019.04.038
- [36] A. A. Portnova-Fahreeva, F. Rizzoglio, I. Nisky et al., “Linear and Non-Linear Dimensionality-Reduction Techniques on Full Hand Kinematics,” Front. Bioeng. Biotechnol., Vol.8, Article No.429, 2020. https://doi.org/10.3389/fbioe.2020.00429
- [37] G. Mornieux, K. Zameziati, E. Mutter, R. Bonnefoy, and A. Belli, “A cycle ergometer mounted on a standard force platform for three-dimensional pedal forces measurement during cycling,” J. of Biomechanics, Vol.39, Issue 7, pp. 1296-1303, 2006. https://doi.org/10.1016/j.jbiomech.2005.03.020
- [38] B. R. Umberger, K. G. Gerritsen, and P. E. Martin, “Muscle fiber type effects on energetically optimal cadences in cycling,” J. of Biomechanics, Vol.39, Issue 8, pp. 1472-1479, 2006. https://doi.org/10.1016/j.jbiomech.2005.03.025
- [39] L. Tang, F. Li, S. Cao, X. Zhang, D. Wu, and X. Chen, “Muscle synergy analysis in children with cerebral palsy,” J. Neural Eng., Vol.12, No.4, Article No.046017, 2015. https://doi.org/10.1088/1741-2560/12/4/046017
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.