Research Paper:
Dynamics Simulation of Biped Robot with Arch Structure and Toe Joint
Reona Nekomoto* and Akinori Sekiguchi**,†
*Sustainable Engineering Program, Graduate School of Engineering, Tokyo University of Technology
1404-1 Katakura, Hachioji, Tokyo 192-0982, Japan
**Department of Mechanical Engineering, School of Engineering, Tokyo University of Technology
1404-1 Katakura, Hachioji, Tokyo 192-0982, Japan
†Corresponding author

The arch structure of human foot absorbs impact and assists push-off movements during walking. The objective of this study is to introduce arch structures and toe joints into a biped robot, verify the effects, and devise walk control methods by dynamics simulation. We simulated the upright state and start of walking using Choreonoid. The results confirmed that the arch structure improved the impact absorption and stability in the anteroposterior direction. In addition, the arch structure could be expected to smooth the load transfer between the supporting legs during the step change.
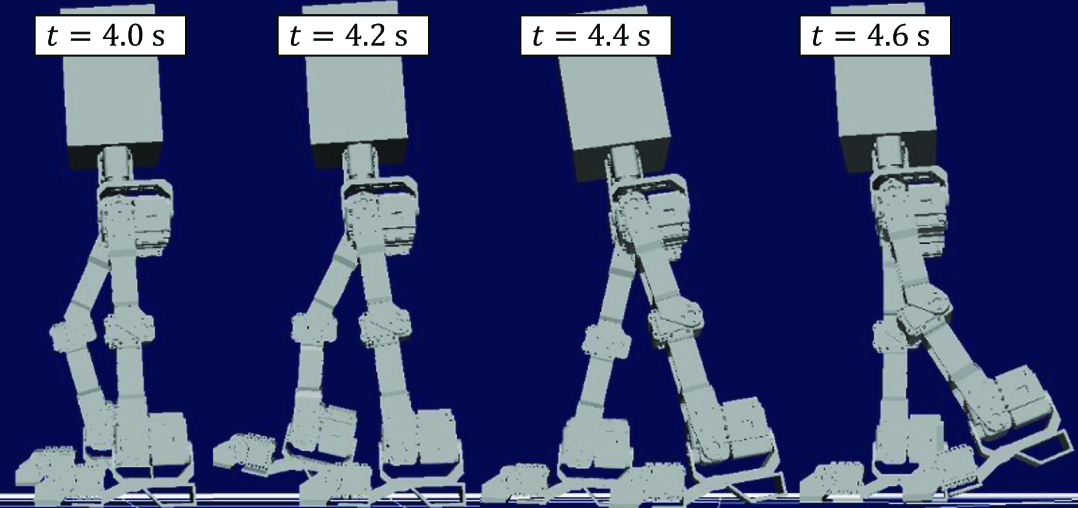
Walking simulation with arch and toe
- [1] P. Michel et al., “Vision-guided humanoid footstep planning for dynamic environments,” 5th IEEE-RAS Int. Conf. on Humanoid Robots, pp. 13-18, 2005. https://doi.org/10.1109/ICHR.2005.1573538
- [2] K. Nishiwaki, J. Chestnutt, and S. Kagami, “Autonomous navigation of a humanoid robot over unknown rough terrain using a laser range sensor,” The Int. J. of Robotics Research, Vol.31, No.11, pp. 1251-1262, 2012. https://doi.org/10.1177/0278364912455720
- [3] M. F. Fallon et al., “Continuous humanoid locomotion over uneven terrain using stereo fusion,” 2015 IEEE-RAS 15th Int. Conf. on Humanoid Robots (Humanoids), pp. 881-888, 2015. https://doi.org/10.1109/HUMANOIDS.2015.7363465
- [4] K. Hashimoto et al., “Terrain-adaptive control to reduce landing impact force for human-carrying biped robot,” 2009 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics, pp. 174-179, 2009. https://doi.org/10.1109/AIM.2009.5230020
- [5] B. G. Son, J. T. Kim, and J. H. Park, “Impedance control for biped robot walking on uneven terrain,” 2009 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO), pp. 239-244, 2009. https://doi.org/10.1109/ROBIO.2009.5420645
- [6] M. Morisawa et al., “Reactive biped walking control for a collision of a swinging foot on uneven terrain,” 2011 11th IEEE-RAS Int. Conf. on Humanoid Robots, pp. 768-773, 2011. https://doi.org/10.1109/Humanoids.2011.6100885
- [7] V.-T. Nguyen and H. Hasegawa, “Effect of toe length on biped walking behavior,” Int. J. of Mechanical Engineering and Robotics Research, Vol.7, No.6, pp. 599-603, 2018. https://doi.org/10.18178/ijmerr.7.6.599-603
- [8] J. R. Guadarrama-Olvera et al., “Enhancing biped locomotion on unknown terrain using tactile feedback,” 2018 IEEE-RAS 18th Int. Conf. on Humanoid Robots (Humanoids), 2018. https://doi.org/10.1109/HUMANOIDS.2018.8625024
- [9] T. Yokomichi and N. Ushimi, “A study of the sole mechanism of biped robots to rough terrain locomotion,” J. Robot. Mechatron., Vol.24, No.5, pp. 902-907, 2012. https://doi.org/10.20965/jrm.2012.p0902
- [10] S. Mamiya, S. Sano, and N. Uchiyama, “Foot structure with divided flat soles and springs for legged robots and experimental verification,” J. Robot. Mechatron., Vol.28, No.6, pp. 799-807, 2016. https://doi.org/10.20965/jrm.2016.p0799
- [11] X. Zang et al., “The development of pneumatic stiffness-adjustable foot for bipedal robot,” 2017 IEEE 2nd Advanced Information Technology, Electronic and Automation Control Conf. (IAEAC), pp. 1588-1592, 2017. https://doi.org/10.1109/IAEAC.2017.8054281
- [12] T. Hashimoto, “The function of the arch of the foot,” J. of the Keio Medical Society, Vol.81, No.1, pp. 17-21, 2004 (in Japanese).
- [13] T. Takashima, H. Fujimoto, and A. Takanishi, “Analysis of the human foot arch viscoelasticity using the simple model of the arch support elements,” Trans. of the Japan Society of Mechanical Engineers Series C, Vol.69, No.685, pp. 2397-2402, 2003 (in Japanese). https://doi.org/10.1299/kikaic.69.2397
- [14] A. Sekiguchi et al., “A study on effect of two-arch structure of foot for biped robots,” 2015 54th Annual Conf. of the Society of Instrument and Control Engineers of Japan (SICE), pp. 1105-1110, 2015. https://doi.org/10.1109/SICE.2015.7285470
- [15] S. Takao et al., “Function analysis of human-like mechanical foot, using mechanically constrained shoes,” 2004 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 3847-3852, 2004. https://doi.org/10.1109/IROS.2004.1390014
- [16] K. Götz-Neumann, “Gehen verstehen: Ganganalyse in der Physiotherapie,” 4th Edition, Thieme, 2016 (in German).
- [17] S. Nakaoka, “Choreonoid: Extensible virtual robot environment built on an integrated GUI framework,” 2012 IEEE/SICE Int. Symp. on System Integration (SII), pp. 79-85, 2012. https://doi.org/10.1109/SII.2012.6427350
- [18] M. Vukobratović et al., “Biped locomotion: Dynamics, stability, control and application,” Springer, 1990.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.