Research Paper:
Positioning Method of Four-Wheel-Steering Mobile Robots Based on Improved UMBmark of Michigan Benchmark Algorithm
Dianjun Wang
 , Meng Xu, Ya Chen†
, Haoxiang Zhong, Yadong Zhu, Zilong Wang
, and Linlin Gao
, Meng Xu, Ya Chen†
, Haoxiang Zhong, Yadong Zhu, Zilong Wang
, and Linlin Gao
Beijing Institute of Petrochemical Technology
No.19 Qingyuan North Street, Huangcun Town, Daxing District, Beijing 102617, China
†Corresponding author

To reduce the error of the odometer positioning system and improve the positioning accuracy of four-wheel-steering mobile robots, three types of coupling errors are considered, based on the University of Michigan Benchmark (UMBmark) method: unequal track width, unequal wheel diameter, and speed difference of ipsilateral wheels. A “dual direction square path experiment” is designed to decouple the error, a new system error model is defined, and an improved UMBmark method for a four-wheel mobile robot is proposed. In the mobile robot positioning system, a laser tracker is used to measure the absolute positions of the starting and ending points of the robot. The positioning test results of the robot using the improved UMBmark method show that the odometer system error is 69.103 mm, which is 2.6 times less than that in the traditional UMBmark method. Hence, the improved UMBmark can better compensate for the system error of four-wheel-steering mobile robots.
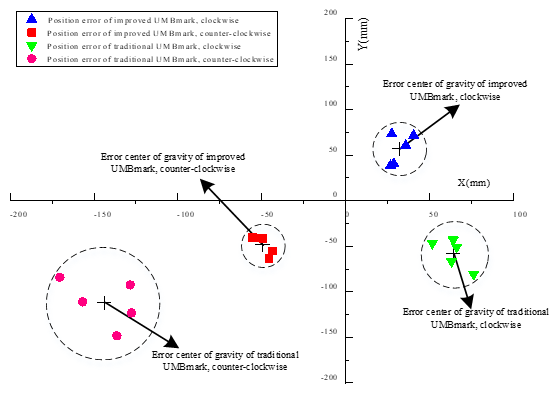
Comparison of the improved with traditional UMBmark
- [1] K. S. Chong and L. Kleeman, “Sonar based map building for a mobile robot,” IEEE Int. Conf. on Robotics & Automation, Vol.2, pp. 1700-1705, 1997.
- [2] M. E. Mosseya, Y. Xi, S. K. McConomy, J. O. Brooks, P. J. Rosopa, and P. J. Venhovens, “Evaluation of four steering wheels to determine driver hand placement in a static environment,” Applied Ergonomics, Vol.45, No.4, pp. 1187-1195, 2014.
- [3] Z. Ziaei, R. Oftadeh, and J. Mattila, “Vision-based path coordination for multiple mobile robots with four steering wheels using an overhead camera,” IEEE Int. Conf. on Advanced Intelligent Mechatronics (AIM), pp. 261-268, 2015.
- [4] J.-X. Yu, Z.-X. Cai, X.-B. Zou, and Z.-H. Duan, “Research on the Calibration Method for the Heading Errors of Mobile Robot Based on Evolutionary Neural Network Prediction,” J. Wang, X.-F. Liao, and Z. Yi (Eds.), “Advances in Neural Networks, Lecture Notes in Computer Science,” Vol.3498, 2005.
- [5] J. Borenstein and L. Feng, “Measurement and correction of systematic odometry errors in mobile robots,” IEEE Trans. on Robotics and Automation, Vol.12, No.6, pp. 869-880, 1996.
- [6] D. Davídek, J. Klečka, K. Horak, and P. Nováček, “Odometer module for mobile robot with position error estimation,” IFAC Papers OnLine, Vol.49, No.25, pp. 346-351, 2016.
- [7] K. Lee, J. C.-B. Jung, and W.-J. Chung, “Accurate calibration of kinematic parameters for two wheel differential mobile robots,” J. of Mechanical Science and Technology, Vol.25, No.6, pp. 1603-1611, 2011.
- [8] W. Wang, Y. Xiong, and R. Sun, “Measurement and calibration of systematic errors of odometry,” ROBOT, Vol.26, No.5, pp. 454-460, 2004 (in Chinese).
- [9] P. Lin, D. Liu, D. Yang, Q. Zou, Y. Du, and M. Cong, “Calibration for odometry of omnidirectional mobile robots based on kinematic correction,” 14th Int. Conf. on Computer Science and Education (ICCSE), pp. 139-144, 2019.
- [10] Y. Maddahi, A. Maddahi, and N. Sepehri, “Calibration of omnidirectional wheeled mobile robots: method and experiments,” Robotica, Vol.31, No.6, pp. 969-980, 2013.
- [11] X. Bei, X. Ping, and W. Gao, “Calibration of systematic odometry errors for wheeled mobile robots,” Application Research of Computers, Vol.35, No.9, pp. 2696-2699+2703, 2018 (in Chinese).
- [12] K. Lee, W. Chung, and K. Yoo, “Kinematic parameter calibration of a car-like mobile robot to improve odometry accuracy,” Mechatronics, Vol.20, No.5, pp. 582-595, 2010.
- [13] J. Shi, J. Liu, and J. Wang, “Novel method to calibrate kinematic parameters for mobile robots,” J. of Beijing Institute of Technology, Vol.24, No.1, pp. 91-96, 2015.
- [14] C. Jung, C. Moon, D. Jung J. Choi, and W. Chung, “Design of test track for accurate calibration of two wheel differential mobile robots,” Int. J. of Precision Engineering and Manufacturing, Vol.15, No.1, pp. 53-61, 2014.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.