Research Paper:
A Neural Network and Generalized Predictive Control Framework for Urban Traffic System Optimal Perimeter Control
Ying Zhang, Yuntao Shi†, Xiang Yin, Meng Zhou, Weichuan Liu, and Daqian Liu
Key Laboratory of Field Bus and Automation of Beijing, North China University of Technology (NCUT)
Beijing 100144, China
†Corresponding author

Optimal perimeter control is one of the effective control technologies to alleviate urban congestion, which is based on macroscopic fundamental diagrams (MFDs). However, most previous optimal perimeter control methods used a linearization model at the desired point to approximate a nonlinear MFDs system, which is vulnerable to causing a potential mismatch between the linearization model and the environmental dynamics. However, this mismatch often leads to performances degradation. To solve this problem, this paper uses a neural network trained from data to approximate the complex nonlinear urban traffic system globally. To facilitate the design and control, this framework linearizes the nonlinear neural network of the traffic system to an instantaneous linearization model. The optimal perimeter control problem is finally solved by generalized predictive control (GPC) with the instantaneous linearization model. A key advantage of the proposed framework is that the global instantaneous linearization model is more accurate than the linearization model around the desired point. Simulation results show that the proposed framework significantly alleviates congestion and reduces the total travel time spent (TTS) in the traffic system compared with no control, “greedy” feedback control and PID control.
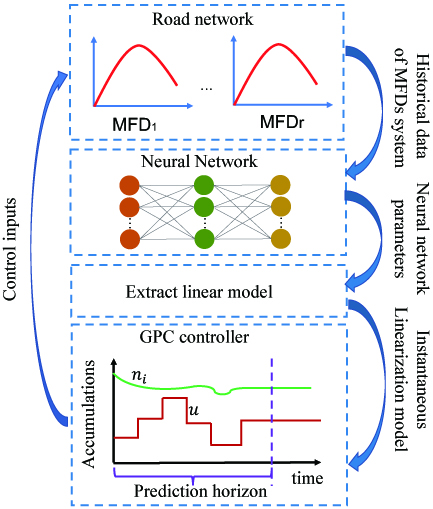
The optimal perimeter control framework
- [1] P. B. Hunt, D. I. Robertson, R. D. Bretherton, and M. C. Royle, “The SCOOT on-line traffic signal optimization technique (Glasgow),” Traffic Engineering and Control, Vol.23, No.4, pp. 190-192, 1982.
- [2] P. R. Lowrie, “SCATS: The Sydney co-ordinated adaptive traffic system–principles, methodology, algorithms,” Int. Conf. on Road Traffic Signaling, pp. 67-70, 1982.
- [3] J. W. Godfrey, “The mechanism of a road network,” Traffic Engineering and Control, Vol.11, pp. 323-327, 1969.
- [4] N. Geroliminis and C. F. Daganzo, “Existence of urban-scale macroscopic fundamental diagrams: Some experimental findings,” Transportation Research Part B: Methodological, Vol.42, No.9, pp. 759-770, 2008.
- [5] C. F. Daganzo, “Urban gridlock: Macroscopic modeling and mitigation approaches,” Transportation Research Part B: Methodological, Vol.41, No.1, pp. 49-62, 2007.
- [6] J. Haddad and N. Geroliminis, “On the stability of traffic perimeter control in two-region urban cities,” Transportation Research Part B: Methodological, Vol.46, No.9, pp. 1159-1176, 2012.
- [7] K. Aboudolas and N. Geroliminis, “Perimeter and boundary flow control in multi-reservoir heterogeneous networks,” Transportation Research Part B: Methodological, Vol.55, pp. 265-281, 2013.
- [8] A. Kouvelas, M. Saeedmanesh, and N. Geroliminis, “Enhancing model-based feedback perimeter control with data-driven online adaptive optimization,” Transportation Research Part B: Methodological, Vol.96, pp. 26-45, 2017.
- [9] M. Yildirimoglu, M. Ramezani, and N. Geroliminis, “Equilibrium analysis and route guidance in large-scale networks with MFD dynamics,” Transportation Research Part C: Emerging Technologies, Vol.59, pp. 404-420, 2015.
- [10] M. Keyvan-Ekbatani, M. Papageorgiou, and V. L. Knoop, “Controller design for gating traffic control in presence of time-delay in urban road networks,” Transportation Research Procedia, Vol.7, pp. 651-668, 2015.
- [11] K. Ampountolas, N. Zheng, and N. Geroliminis, “Macroscopic modeling and robust control of bi-modal multi-region urban road networks,” Transportation Research Part B: Methodological, Vol.104, pp. 616-637, 2017.
- [12] J. Haddad, “Robust Constrained Control of Uncertain Macroscopic Fundamental Diagram Networks,” Transportation Research Procedia, Vol.7, pp. 669-688, 2015.
- [13] N. Geroliminis, J. Haddad, and M. Ramezani, “Optimal Perimeter Control for Two Urban Regions with Macroscopic Fundamental Diagrams: A Model Predictive Approach,” IEEE Trans. on Intelligent Transportation Systems, Vol.14, No.1, pp. 348-359, 2013.
- [14] J. Haddad, M. Ramezani, and N. Geroliminis, “Cooperative traffic control of a mixed network with two urban regions and a freeway,” Transportation Research Part B: Methodological, Vol.54, pp. 17-36, 2013.
- [15] J. Haddad and B. Mirkin, “Adaptive perimeter traffic control of urban road networks based on MFD model with time delays,” Int. J. of Robust and Nonlinear Control, Vol.26, No.6, pp. 1267-1285, 2016.
- [16] E. Harati, S. Timotheou, and C. Panayiotou, “Unscented stochastic model predictive perimeter control of uncertain two-regions urban traffic,” Int. Federation of Automatic Control (IFAC) PapersOnLine, Vol.53, No.2, pp. 14930-14935, 2020.
- [17] X. S. Gao and V. V. Gayah, “An Analytical Framework to Model Uncertainty in Urban Network Dynamics Using Macroscopic Fundamental Diagrams,” Transportation Research Part B: Methodological, Vol.117, Part B, pp. 660-675, 2018.
- [18] H. Fu, N. Liu, and G. Hu, “Hierarchical perimeter control with guaranteed stability for dynamically coupled heterogeneous urban traffic,” Transportation Research Part C: Emerging Technologies, Vol.83, pp. 18-38, 2017.
- [19] Z. Zhou, B. D. Schutter, S. Lin, and Y. Xi, “Two-level hierarchical model-based predictive control for large-scale urban traffic networks,” IEEE Trans. on Control Systems Technology, Vol.25, No.2, pp. 496-508, 2017.
- [20] I. I. Sirmatel and N. Geroliminis, “Economic Model Predictive Control of Large-Scale Urban Road Networks via Perimeter Control and Regional Route Guidance,” IEEE Trans. on Intelligent Transportation Systems, Vol.19, No.4, pp. 1112-1121, 2018.
- [21] F. Huang, P. Yi, J. Wang et al., “A dynamical spatial-temporal graph neural network for traffic demand prediction,” Information Sciences, Vol.594, pp. 286-304, 2022.
- [22] J. Liu and Y. L. Huang, “Nonlinear network traffic prediction based on BP neural network,” J. Computer Application, Vol.27, No.7, pp. 1770-1772, 2007 (in Chinese).
- [23] J. Lei and B. Xie, “Short term Accumulations Forecasting Using License Recognition Data,” Int. J. of New Technology and Research, Vol.4, No.5, pp. 7-15, 2018.
- [24] G. B. Castro, J. S. C. Martini, and A. R. Hirakawa, “Biologically-inspired neural network for traffic signal control,” 17th Int. IEEE Conf. on Intelligent Transportation Systems (ITSC), pp. 2144-2149, 2014.
- [25] D. W. Clarke, C. Mohtadi, and P. S. Tuffs, “Generalized Predictive Control–Part II Extensions and Interpretations,” Automatica, Vol.23, No.2, pp. 149-160, 1987.
- [26] D. Liu, “Neural networks for modeling and control of dynamic systems: A practitioner’s handbook,” Automatica, Vol.38, No.9, pp. 1625-1626, 2002.
- [27] R. Hecht-Nielsen, “Kolmogorov’s Mapping Neural Network Existence Theorem,” IEEE Int. Conf. on Neural Network, Vol.III, pp. 11-13, 1987.
- [28] T. Lei, Z. Hou, and Y. Ren, “Data-driven model free adaptive perimeter control for multi-region urban traffic networks with route choice,” IEEE Trans. on Intelligent Transportation Systems, Vol.21, No.7, pp. 2894-2905, 2020.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.