Paper:
Observation of Human Entrainment with Robot Assistance Towards Education
Tzong-Xiang Huang, Eri Sato-Shimokawara, and Toru Yamaguchi
Department of Computer Science, Graduate School of Systems Design, Tokyo Metropolitan University
6-6 Asahigaoka, Hino-shi, Tokyo 191-0065, Japan

At present, the world faces the challenge of making education available to all the people of the world, especially in under-developed areas, where there is a lack of human resources. To improve educational standards and address this lack of human resources, we believe that robots can be a good teaching aid, to assist both the teacher and the student. This study investigated the entrainment phenomenon between human interactions with a robot as a third-party influence to provide learning packages that will be suited for students and will reduce the strain on teachers. We used dynamic time warping (DTW) algorithm in our time series analysis to effectively calculate the similarity of the brainwaves of the subjects. Then, we defined the entrainment phenomenon between the subjects. To ensure the complexity of this experiment, crosswords were used for this task, which subjects were required to complete in cooperation with each another. At different points of time, the robot would use different expressions, actions, and words as reminders or hints, aiding communication and better cooperation between subjects. The timing of the robotic reminders, synchronization, conversations between the subjects in the crossword tasks, and the completion rate of the crossword puzzles were recorded. The average completion rate improved by 10% with the aid of the robot, as opposed to not using the robot. The results of this study prove that robotic participation in human interaction is beneficial, and that implementing robotic assistance will improve education.
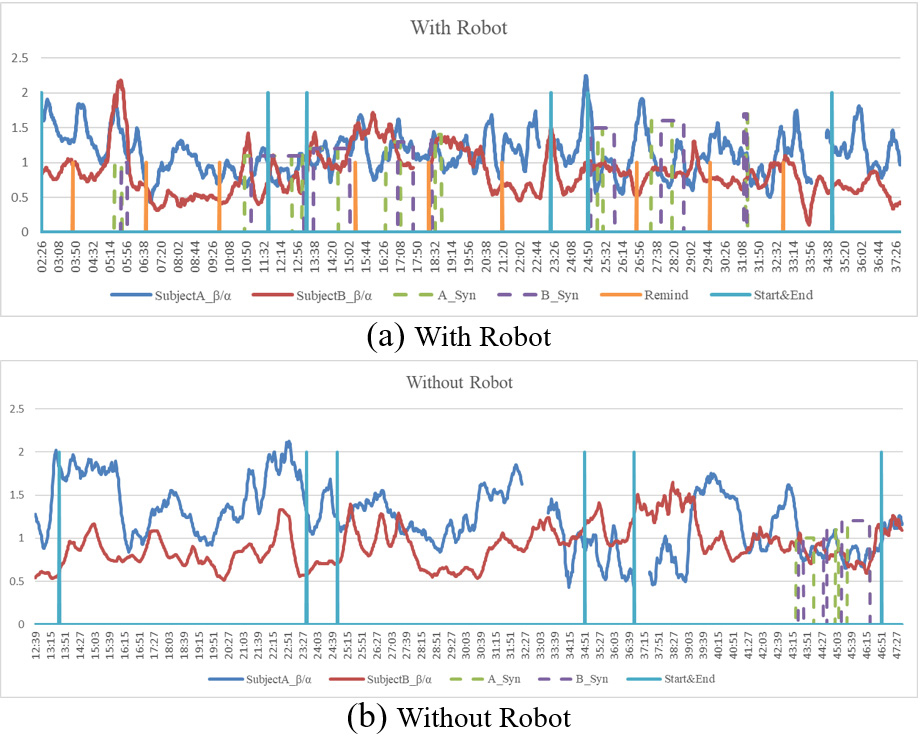
Brainwave comparison with and without robot
- [1] T. Kanda et al., “Interactive robots as social partners and peer tutors for children: A field trial,” Human-Computer Interaction, Vol.19, No.1, pp. 61-84, 2004.
- [2] T. Kanda and H. Ishiguro, “Communication robots for elementary schools,” Proc. of the Symp. on Robot Companions: Hard Problems and Open Challenges in Robot-Human Interaction, pp. 54-63, 2005.
- [3] E. Matson, S. DeLoach, and R. Pauly, “Building interest in math and science for rural and underserved elementary school children using robots,” J. of STEM Education: Innovations and Research, Vol.5, Nos.3-4, pp. 35-46, 2004.
- [4] C.-S. Lee et al., “A study on AI-FML robotic agent for student learning behavior ontology construction,” 2020 Int. Symp. on Community-centric Systems (CcS), doi: 10.1109/CcS49175.2020.9231339, 2020.
- [5] A. Kendon, “Movement coordination in social interaction: Some examples described,” Acta Psychologica, Vol.32, pp. 101-125, 1970.
- [6] W. S. Condon and L. W. Sander, “Neonate movement is synchronized with adult speech: Interactional participation and language acquisition,” Science, Vol.183, No.4120, pp. 99-101, 1974.
- [7] M. F. M. Donnell and J. P. Flynn, “Attack Elicited by Stimulation of the Thalamus and Adjacent Structures of Cats,” Behaviour, Vol.31, Nos.3-4, pp. 185-202, 1968.
- [8] T. Iio et al., “Lexical entrainment in human-robot interaction: Can robots entrain human vocabulary?,” 2009 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3727-3734, 2009.
- [9] R. Gomi et al., “Analysis of Speech Dialogue to Detect Active Conversation and Lapse in Conversation Toward Development of Conversation Support Robot After Co-Occurrence and Mutual Assistance Matching,” J. of Signal Processing, Vol.23, No.1, pp. 9-22, 2019.
- [10] T.-X. Huang et al., “Analysis of Relation Between Brainwave and Heart Rate Information Towards Entrainment Robot Assistance,” 2020 Int. Symp. on CcS, doi: 10.1109/CcS49175.2020.9231392, 2020.
- [11] M. Tudor, L. Tudor, and K. I. Tudor, “Hans Berger (1873–1941) – The history of electroencephalography,” Acta Medica Croatica, Vol.59, No.4, pp. 307-313, 2005.
- [12] P. Bashivan, I. Rish, and S. Heisig, “Mental state recognition via wearable EEG,” arXiv:1602.00985, 2016.
- [13] Z. Guo et al., “Detection of driver vigilance level using EEG signals and driving contexts,” IEEE Trans. on Reliability, Vol.67, No.1, pp. 370-380, 2017.
- [14] A. Hashemi et al., “Characterizing population EEG dynamics throughout adulthood,” eNeuro, Vol.3, No.6, doi: 10.1523/ENEURO.0275-16.2016, 2016.
- [15] Y. Liu and O. Sourina, “EEG-based dominance level recognition for emotion-enabled interaction,” 2012 IEEE Int. Conf. on Multimedia and Expo, pp. 1039-1044, 2012.
- [16] B. D. Hatfield, D. M. Landers, and W. J. Ray, “Cognitive processes during self-paced motor performance: An electroencephalographic profile of skilled marksmen,” J. of Sport and Exercise Psychology, Vol.6, No.1, pp. 42-59, 1984.
- [17] D. J. Crews and D. M. Landers, “Electroencephalographic measures of attentional patterns prior to the golf putt,” Medicine & Science in Sports & Exercise, Vol.25, No.1, pp. 116-126, 1993.
- [18] S. P. Deeny et al., “Cortico-cortical communication and superior performance in skilled marksmen: An EEG coherence analysis,” J. of Sport and Exercise Psychology, Vol.25, No.2, pp. 188-204, 2003.
- [19] T. Y. Wen and S. A. M. Aris, “Electroencephalogram (EEG) stress analysis on alpha/beta ratio and theta/beta ratio,” Indonesian J. of Electrical Engineering and Computer Science, Vol.17, No.1, pp. 175-182, 2020.
- [20] Wikipedia, “Moving average.” https://en.wikipedia.org/wiki/Moving_average [accessed September 13, 2022]
- [21] M. Müller, “Dynamic Time Warping,” in “Information Retrieval for Music and Motion,” pp. 69-84, Springer Berlin Heidelberg, 2007.
- [22] S. Salvador and P. Chan, “Toward accurate dynamic time warping in linear time and space,” Intelligent Data Analysis, Vol.11, No.5, pp. 561-580, 2007.
- [23] Y. Shi et al., “Dynamic Time-Frequency Feature Extraction for Brain Activity Recognition,” 2018 40th Annual Int. Conf. of the IEEE Engineering in Medicine and Biology Society (EMBC), pp. 3104-3107, 2018.
- [24] Wikipedia, “Blockly.” https://en.wikipedia.org/w/index.php?title=Blockly&oldid=1064050895 [accessed April 21, 2022]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.