Paper:
Design and Motion Analysis of a Mobile Robot Based on Linkage Suspension
Ya Chen*, Dianjun Wang*,†, Haoxiang Zhong*, Yadong Zhu*, Jiaheng Yang*, and Chaoxing Wang**
*Beijing Institute of Petrochemical Technology (BIPT)
No.19 Qingyuan North Street, Huangcun Town, Daxing District, Beijing 102617, China
**Beijing U-Precision Tech Co., Ltd.
No.19 Kechuang 10th Street, Beijing Economic-Technological Development Area, Beijing 100176, China
†Corresponding author

With the wide application of mobile robots, their environment and tasks are becoming more complex. There are more requirements for its performance, such as improving environmental adaptability, while ensuring efficiency. This study proposes an all-terrain mobile robot with a linkage suspension and its complex kinematics and dynamic model are studied. According to the wheelcenter modeling method, the kinematic characteristics of the six wheels of a mobile robot under irregular terrain are analyzed and the kinematics theoretical model is established. Based on the D’Alembert principle, the dynamic model of each stage is established as the robot climbs over the steps. Thereafter, motion simulation analysis is conducted using a virtual prototype technology to verify the rationality of the structural design. Finally, the error test of the mobile robot prototype is executed, and the average deviation error of linear motion is 13.251 mm, whereas the forward and backward in situ turning errors are 9.906 mm and 9.189 mm, respectively. The test results indicate that the kinematics theoretical analysis of the mobile robot is reasonable, and the robot has good motion ability. This study provides a theoretical basis for the research of high-quality navigation and control system of the mobile robot.
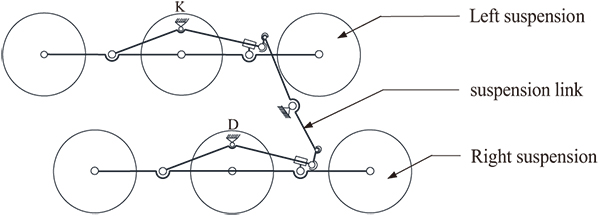
Schematic diagram of the entire suspension structure
- [1] W. Wang, W. Gao, D. Wu, and Z. Du, “Research on a mobile manipulator for biochemical sampling tasks,” Industrial Robot, Vol.44, Issue 4, pp. 467-478, 2017.
- [2] J. C. Chen, X. M. Qian, and P. H. Lou, “Application research on AGV case: automated electricity meter verification shop floor,” Industrial Robot, Vol.44, Issue 4, pp. 491-500, 2017.
- [3] M. Tanaka, M. Nakajima, Y. Suzuki, and K. Tanaka, “Development and Control of Articulated Mobile Robot for Climbing Steep Stairs,” IEEE/ASME Trans. on Mechatronics, Vol.23, Issue 2, pp. 531-541, 2018.
- [4] L. Song, J. Zhu, X. Jin, and L. Huang, “Design and Kinematic Simulation of Travel Mechanism for Reconfigurable Tracked Robot,” Light Industry Machinery, Vol.36, Issue 1, pp. 29-34, 2018.
- [5] J. Guo, H. Gao, L. Ding, T. Guo, and Z. Deng, “Linear normal stress under a wheel in skid for wheeled mobile robots running on sandy terrain,” J. of Terramechanics, Vol.70, pp. 49-57, 2017.
- [6] T. Omura and G. Ishigami, “Wheel Slip Classification Method for Mobile Robot in Sandy Terrain Using In-Wheel Sensor,” J. Robot. Mechatron., Vol.29, No.5, pp. 902-910, 2017.
- [7] D. Chugo, K. Kawabata, H. Kaetsu, H. Asama, T. Mishima, and K. Takase, “3D odometry based on body configuration information of passive linkages,” 34th Annual Conf. of IEEE Industrial Electronics, pp. 1553-1558, 2008.
- [8] Z. Luo, J. Shang, and Z. Zhang, “A reconfigurable tracked mobile robot based on four-linkage mechanism,” J. Cent. South Univ., Vol.20, pp. 62-70, 2013.
- [9] E. L. D. L. Bascetta, D. A. Cucci, M. Matteucci, and G. Bardaro, “A Modelica simulator to support the development of the control system of an autonomous all-terrain mobile robot,” Int. Federation of Automatic Control (IFAC) PapersOnLine, Vol.48, Issue 1, pp. 274-279, 2015.
- [10] L. Bascetta, D. A. Cucci, and M. Matteucci, “Kinematic trajectory tracking controller for an all-terrain Ackermann steering vehicle,” IFAC-PapersOnLine, Vol.49, Issue 15, pp. 13-18, 2016.
- [11] Y. Tian and N. Sarkar, “Control of a Mobile Robot Subject to Wheel Slip,” J. of Intelligent & Robotic Systems, Vol.74, pp. 915-929, 2014.
- [12] C.-H. Wu, I.-S. Lin, and M.-L. Wei, “Fuzzy Control of Target Approaching and Object-Grabbing for a Four-Wheeled Vision-Based Mobile Robot,” J. Adv. Comput. Intell. Intell. Inform., Vol.17, No.2, pp. 343-350, 2013.
- [13] C. Zhang, F. Yu, H. Duan, and Y. Chen, “Dynamic modelling and finite element structural optimization of glass handling robot,” Int. J. of Structural Integrity, Vol.8, No.3, pp. 423-434, 2017.
- [14] L. Ge, J. Chen, R. Li, and P. Liang, “Optimization Design of Drive System for Industrial Robots Based on Dynamic Performance,” Industrial Robot, Vol.44, Issue 6, pp. 765-775, 2017.
- [15] V. Böhm, T. Kaufhold, I. Zeidis, and K. Zimmermann, “Dynamic analysis of a spherical mobile robot based on a tensegrity structure with two curved compressed members,” Archive of Applied Mechanics, Vol.87, pp. 853-864, 2017.
- [16] H.-B. Tian, H.-W. Ma, Y.-S. Zhang, and W.-F. Shang, “Design and subsumed terrain analysis of wheel-tracked mobile robot,” J. of Machine Design, No.9, pp. 26-30, 2014 (in Chinese).
- [17] L. Miková, M. Kelemen, and P. Nestorovič, “Design of Wheeled Robot for Rough Terrain,” Applied Mechanics and Materials, Vol.816, pp. 270-275, 2015.
- [18] C. F. Tan, E. S. Ng, and A. T. Din, “Mechanical Design and Analysis of All-Terrain Mobile Robot,” J. Teknologi, Vol.58, No.1, pp. 21-25, 2012.
- [19] T. Jilek, F. Burian, and V. Kriz, “Kinematic Models for Odometry of a Six-Wheeled Mobile Robot,” IFAC-PapersOnLine, Vol.49, Issue 25, pp. 305-310, 2016.
- [20] Y. Chang, S. Ma, H. Wang, D. Tan, and X. Song, “Method of Kinematic Modeling of Wheeled Mobile Robot,” Chinese J. of Mechanical Engineering, Vol.46, Issue 5, pp. 30-36, 2010 (in Chinese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.