Paper:
Design and Implementation of the Universal Servo Control Algorithm Verification System Based on High-Speed Communication Fieldbus
Yonghua Xiong*,**, Ke Li*,**, Zhen-Tao Liu*,**,†, and Jinhua She*,**,***
*School of Automation, China University of Geosciences
No.388 Lumo Road, Wuhan, Hubei 430074, China
**Hubei Key Laboratory of Advanced Control and Intelligent Automation for Complex Systems
No.388 Lumo Road, Wuhan, Hubei 430074, China
***School of Engineering, Tokyo University of Technology
Katakura, Hachioji, Tokyo 192-0982, Japan
†Corresponding author

In recent years, there have been several breakthroughs in the theoretical research of servo control algorithms. However most of these control algorithms remain in the simulation stage. They are difficult to be applied directly to practical platforms or complex industrial sites because of the lack of an experimental system suitable for the verification of their effectiveness. To address this problem, we designed a multi-function servo control algorithm verification experiment system (MVES) within the MATLAB/Simulink theoretical simulation model directly to communicate with the TwinCAT 3 PLC master program to perform different servo control experiments. The MVES supports various Simulink models. However, its and the operation is simple and convenient, which greatly reduces the workload of the algorithm test and has important practical value. Two sets of comparative experiments were used to verify the versatility and superiority of MVES.
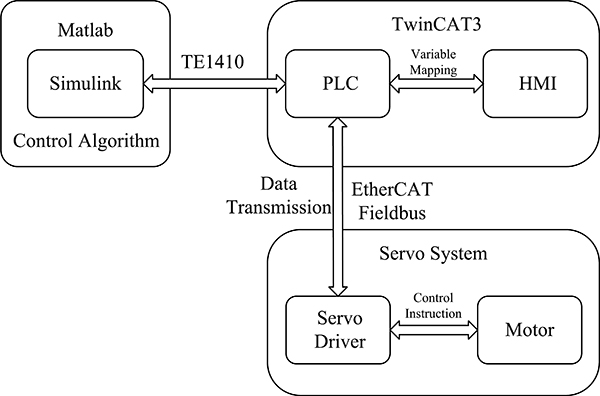
System control data flow
- [1] P. Shen and H. X. Li, “A multiple periodic disturbance rejection control for process with long dead-time,” Int. J. of Control, Vol.24, No.9, pp. 1394-1401, 2014.
- [2] J. Sun, C. Wang, and R. Xin, “Anti-Disturbance Study of Position Servo System Based on Disturbance Observer,” IFAC-PapersOnLine, Vol.51, No.4, pp. 202-207, 2018.
- [3] Z. Yang, J. Du, S. Yu et al., “DSP-based design and implementation of a smart elevator door motor control system,” 2011 8th Asian Control Conf. (ASCC), 2011.
- [4] J. Yao, Z. Jiao, D. Ma et al., “High-accuracy tracking control of hydraulic rotary actuators with modeling uncertainties,” IEEE/ASME Trans. on Mechatronics, Vol.19, No.2, pp. 633-641, 2013.
- [5] M. Yang, Z. Liu, J. Long et al., “An Algorithm for Online Inertia Identification and Load Torque Observation via Adaptive Kalman Observer-Recursive Least Squares,” Energies, Vol.11, No.4, pp. 778, 2018.
- [6] D. Jansen and H. Buttner, “Real-time Ethernet: the EtherCAT solution,” Computing and Control Engineering, Vol.15, No.1, pp. 16-21, 2004.
- [7] H. P. Ren and X. Wang, “PLC based variable structure control of hydraulic position servo system considering controller saturation,” 13th IEEE Conf. on Industrial Electronics and Applications (ICIEA), 2018.
- [8] A. Ghaffari and A. G. Ulsoy, “Experimental verification of dynamic contour error estimation for high-precision contouring of two-axis servo-systems,” ASME 2015 Dynamic Systems and Control Conf., 2015.
- [9] Z. Chen, K. Zhang, S. X. Ding et al., “Improved canonical correlation analysis-based fault detection methods for industrial processes,” J. of Process Control, Vol.41, pp. 26-34, 2016.
- [10] L. Huan and L. Qiang, “Development of an open CNC system for multi-axis machine tools based on TwinCAT and .NET,” IEEE Int. Conf. on Mechatronics and Automation (ICMA), 2015.
- [11] S. C. Chae, J. S. Lee, S. Kim et al., “Random circuit breaker network model for unipolar resistance switching,” Advanced Materials, Vol.20, No.6, pp. 1154-1159, 2008.
- [12] W. Lin, D. Jovcic, S. Nguefeu et al., “Modelling of high-power hybrid DC circuit breaker for grid-level studies,” IET Power Electronics, Vol.9, No.2, pp. 237-246, 2016.
- [13] W. Curt, “Method and apparatus for smart circuit breaker,” U.S. Patent 9,595,825, 2017-3-14.
- [14] J. A. Bauer, “Electromagnetic contactor with energy balanced closing system,” U.S. Patent 4,893,102, 1990-1-9.
- [15] J. Wang, B. Yang, J. Zhao et al., “Development of a compact 750KVA three-phase NPC three-level universal inverter module with specifically designed busbar,” 2010 25th Annual IEEE Applied Power Electronics Conf. and Exposition (APEC), 2010.
- [16] C. M. Leng, C. L. Chen, Y. L. Lin et al., “A simple circuit to remove X-cap bleeder resistor for reducing standby power consumption,” IEICE Electronics Express, Vol.13, No.8, 20160174, 2016.
- [17] G. Cena, I. C. Bertolotti, S. Scanzio et al., “Evaluation of EtherCAT distributed clock performance,” IEEE Trans. on Industrial Informatics, Vol.8, No.1, pp. 20-29, 2011.
- [18] X. Wu, H. Zhou, H. Yue et al., “The Optimization Design and Motion Characteristic Experiment of PMLSM Based on GA and TwinCAT,” Int. J. of Simulation: Systems, Science and Technology, Vol.17, No.27, pp. 20-29, 2016.
- [19] E. M. Sartika, I. Maulidin, and T. A. Putra.“Perancangan dan Realisasi Alat Demonstrasi PC-based Control untuk Simulasi Keamanan Bangunan menggunakan Embedded PC,” Kendali-Tenaga-Elektronika-Telekomunikasi-Komputer, Vol.7, No.1, pp. 46-59, 2018 (in Indonesian with English abstract).
- [20] C. Paleologu, J. Benesty, and S. Ciochina, “A robust variable forgetting factor recursive least-squares algorithm for system identification,” IEEE Signal Processing Letters, Vol.15, No.2, pp. 597-600, 2008.
- [21] H. Kim, J. Lim, S. Baek et al., “Robust Kalman filtering with variable forgetting factor against impulsive noise,” IEICE Trans. on Fundamentals of Electronics, Communications and Computer Sciences, Vol.84, No.1, pp. 363-366, 2001.
- [22] R. Jiang, J. She, Z. Liu et al., “Attenuation of PMSM Torque-Ripple Based on Combination of Equivalent-Input-Disturbance Approach and Sliding-Mode Control,” IECON 2019-45th Annual Conf. of the IEEE Industrial Electronics Society, 2019.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.