Paper:
Determining the Most Effective Way of Ensuring a Tidying-Up Behavior: Comparison of Effects of Reminders Using Oral Instruction, Posters, and Robots
Akihiro Ogasawara and Manabu Gouko
Tohoku Gakuin University
1-13-1 Chuo, Tagajo, Miyagi 985-8537, Japan

A common method for encouraging a user to tidy up his/her office or school desk is to provide oral instructions or displaying posters. Some researchers have proposed a robot system to encourage users to tidy up. However, little attention has been paid to performing a comparative analysis of the various methods for motivating users to tidy up. In this study, we investigated the effects of motivating participants using verbal reminders, posters, and robots. Our results showed that urging users using vibrations produced by a robot is more effective than using oral instructions or posters. Particularly, using a robot is effective in reducing microslips and maintaining the motivation for tidying up.
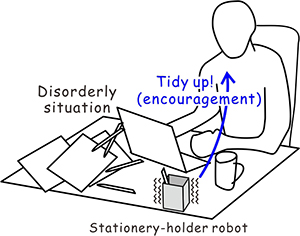
Situation of encouragement for tidying up using a stationery-holder robot
- [1] M. Kondo, “The Life-Changing Magic of Tidying Up: The Japanese Art of Decluttering and Organizing,” Ten Speed Press, 2014.
- [2] T. A. Fabrizio and D. Tapping, “5S for the Office: Organizing the Workplace to Eliminate Waste,” Productivity Press, 2006.
- [3] A. Ogasawara and M. Gouko, “Stationery Holder Robot that Encourages Office Workers to Tidy Their Desks,” Proc. of the 5th Int. Conf. on Human Agent Interaction (HAI’17), pp. 439-441, 2017.
- [4] C. Cosma, M. Confente, M. Governo, and R. Fiorini, “An autonomous robot for indoor light logistics,” Proc. of 2004 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Vol.3, pp. 3003-3008, 2004.
- [5] B. K. Kim, K. Ohara, K. Kitagaki, and K. Ohba, “Design and Control of Librarian Robot System in Information Structured Environments,” J. Robot. Mechatron., Vol.21, No.4, pp. 507-514, 2009.
- [6] R. Fukui, T. Mori, and T. Sato, “Home-Use Object Transfer/Storage Robot System with Compliant Strategy and Mechanism (Commodities Management and its Extended Application of Daily Life Support for the Elderly),” J. Robot. Mechatron., Vol.23, No.4, pp. 532-543, 2009.
- [7] J. Fink, S. Lemaignan, P. Dillenbourg, P. Rétornaz, F. Vaussard, A. Berthoud, F. Mondada, F. Wille, and K. Franinović, “Which Robot Behavior Can Motivate Children to Tidy up Their Toys?: Design and Evaluation of “Ranger”,” Proc. of 9th ACM/IEEE Int. Conf. on Human-Robot Interaction (HRI’14), pp. 439-446, 2014.
- [8] F. Mondada, J. Fink, S. Lemaignan, D. Mansolino, F. Wille, and K. Franinović, “Ranger, An Example of Integration of Robotics into the Home Ecosystem,” H. Bleuler, M. Bouri, F. Mondada, D. Pisla, A. Rodic, and P. Helmer (Eds.), “New Trends in Medical and Service Robots: Assistive, Surgical and Educational Robotics,” pp. 181-189, Springer, 2016.
- [9] K. Nishimoto, A. Ikenoue, K. Shimizu, T. Tajima, Y. Tanaka, Y. Baba, and X. Wang, “TableCross: Exuding a Shared Space into Personal Spaces to Encourage Its Voluntary Maintenance,” Proc. of CHI’11 Extended Abstracts on Human Factors in Computing Systems (CHI EA’11), pp. 1423-1428, 2011.
- [10] Y. Yamaji, T. Miyake, Y. Yoshiike, P. R. S. De Silva, and M. Okada, “STB: Child-Dependent Sociable Trash Box,” Int. J. of Social Robotics, Vol.3, Issue 4, pp. 359-370, 2011.
- [11] S. Yang, B. K.-J. Mok, D. Sirkin, H. P. Ive, R. Maheshwari, K. Fischer, and W. Ju, “Experiences developing socially acceptable interactions for a robotic trash barrel,” Proc. of 24th IEEE Int. Symp. on Robot and Human Interactive Communication (RO-MAN), pp. 277-284, 2015.
- [12] M. Gouko and C. H. Kim, “Can object-exclusion behavior of robot encourage human to tidy up tabletop?,” Proc. of 2016 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO), pp. 1838-1844, 2016.
- [13] E. S. Reed, C. F. Palmer, and D. Schoenherr, “On the nature and significance of microslips in everyday activities,” J. of Ecological Psychology, Vol.4, No.1, pp. 68-78, 2009.
- [14] K. Suzuki, H. Mishima, and M. Sasaki, “Affordances and Variability of Actions: Environment, Action and Microslips,” J. of Japan Society for Fuzzy Theory and Systems, Vol.9, No.6, pp. 826-837, 1997 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.