Paper:
Improved Model-Free Adaptive Control of Pneumatic Gravity Compensation System
Yu Liu*, Feng Peng*, Zhen Hua**,†, Changlong Liu*, and Guoxin Zhao*
*Information Engineering College, Beijing Institute of Petrochemical Technology
No.19 Qingyuan North Road, Daxing District, Beijing 102617, China
**Information Science Department, Beijing University of Technology
No.100 Pingleyuan, Chaoyang District, Beijing 100022, China
†Corresponding author

A pneumatic gravity compensation system is typically nonlinear in behavior. It is difficult to establish an accurate mathematical model for it, and it is particularly difficult to realize high-precision pressure control. A pneumatic gravity compensation system driven by a frictionless cylinder is built. Considering that the traditional model-free adaptive control is slow for pseudo-gradient identification, an improved model-free adaptive control is proposed to predict the changes in the pseudo gradient and accelerate the process of pseudo gradient identification. The static and dynamic gravity compensation of the pneumatic gravity compensation system is realized. Finally, the experimental results show that the steady-error of step response of the improved model-free adaptive controller is less than 200 Pa, and the rise time is approximately 13 seconds. The sinusoidal tracking error (0.04 Hz) is approximately 1.94 KPa.
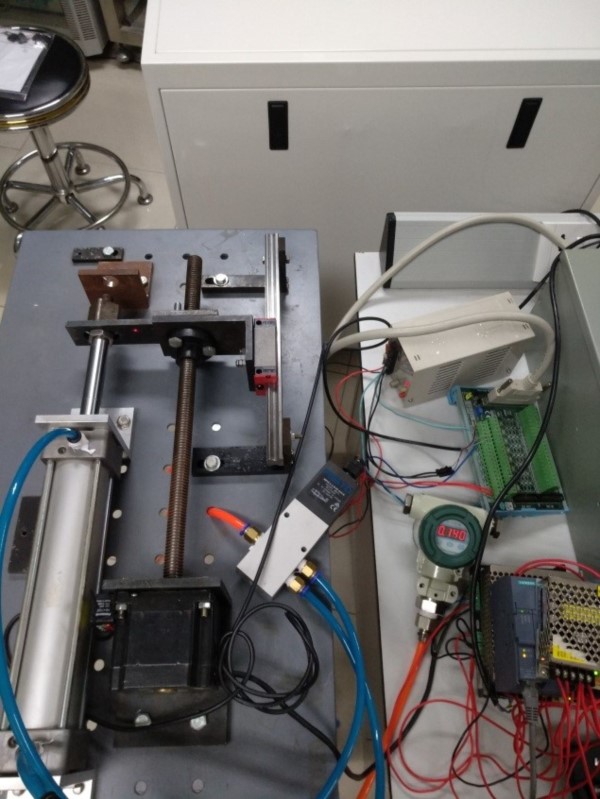
Experimental setup of pneumatic gravity compensation system
- [1] C. R. Carignan and D. L. Akin, “The Reaction Stabilization of On-Orbit Robots,” IEEE Control Systems Magazine, Vol.20, No.6, pp. 19-33, 2000.
- [2] D. Lee and T. Seo, “Lightweight Multi-DOF Manipulator with Wire-Driven Gravity Compensation Mechanism,” IEEE/ASME Trans. on Mechatronics, Vol.22, No.3, pp. 1308-1314, 2017.
- [3] C. Menon, S. Busolo, S. Cocuzza, A. Aboudan, A. Bulgarelli, C. Bettanini, M. Marchesi, and F. Angrilli, “Issues and Solutions for Testing Free-Flying Robots,” Acta Astronautica, Vol.60, Issue 12, pp. 957-965, 2007.
- [4] K. Araki, J. Chen, X. Chen, and Y. Ishino “Structural Optimization of a Motion and Force Control Cylinder,” Proc. of the JFPS Int. Symp. on Fluid Power, pp. 337-342, 1996.
- [5] P. Bigras, K. Khayati, and T. Wong, “Modified feedback linearization controller for pneumatic system with non negligible connection port restriction,” Proc. of 2002 IEEE Int. Conf. on Systems Man and Cybernetics, Vol.2, pp. 227-231, 2002.
- [6] K. Khayati, P. Bigras, and L.-A. Dessaint, “A Robust Feedback Linearization Force Control of a Pneumatic Actuator,” Proc. of 2004 IEEE Int. Conf. on Systems, Man and Cybernetics, Vol.7, pp. 6113-6119, 2004.
- [7] N. Gulati and E. J. Barth, “Pressure observer based servo control of pneumatic actuators,” Proc. of 2005 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics, pp. 498-503, 2005.
- [8] P. Chaewieang, K. Sirisantisamrit, and T. Thepmanee, “Pressure control of pneumatic-pressure-load system using generalized predictive controller,” Proc. of 2008 IEEE Int. Conf. on Mechatronics and Automation, pp. 788-791, 2008.
- [9] Y. Bai and X. Li, “Research on Proportional Valve-based Pneumatic Rotary Actuator Position Servo System and Its Control Strategy,” Chinese Hydraulics & Pneumatics, Vol.2005, No.2, pp. 10-13, 2005 (in Chinese).
- [10] B. Li, Q. Zhang, and J. Du, “A High Accuracy Pressure Servo System,” Hydraulics Pneumatics & Seals, Vol.2000, No.2, pp. 10-11+52, 2000 (in Chinese).
- [11] B. Li, H. Liu, and X. Fu, “Theoretical and Experimental Research on Pressure Servo Control System of Closed Chamber,” Chinese Hydraulics & Pneumatics, Vol.2004, No.7, pp. 1-3, 2004 (in Chinese).
- [12] X. Zhu, G. Tao, and J. Cao, “Posture Trajectory Tracking Control of Parallel Manipulator Driven by Pneumatic Muscles,” Chinese J. of Mechanical Engineering, Vol.2008, No.7, pp. 161-167, 2008 (in Chinese).
- [13] L. Li, Y.-H. Liu, T. Jiang, K. Wang, and M. Fang, “Adaptive Trajectory Tracking of Nonholonomic Mobile Robots Using Vision-Based Position and Velocity Estimation,” IEEE Trans. on Cybernetics, Vol.48, No.2, pp. 571-582, 2018.
- [14] S. Chen, “Trajectory Tracking and Control Algorithm for Precision Parallel Robot,” J. Adv. Comput. Intell. Intell. Inform., Vol.23, No.2, pp. 237-241, 2019.
- [15] K. Liu and J. Leng, “The Study on the Desired Trajectory Tracking Control of Quadrotor UAV,” Computer Simulation, Vol.34, No.5, pp. 103-107, 2017 (in Chinese).
- [16] R. Deimel and O. Brock, “A novel type of compliant and underactuated robotic hand for dexterous grasping,” The Int. J. of Robotics Research, Vol.35, Issue 1-3, pp. 161-185, 2016.
- [17] Z. Li and J. Zhao, “Research on the Method of Robot Arm Trajectory Planning Under Chaos Control,” J. Adv. Comput. Intell. Intell. Inform., Vol.23, No.2, pp. 345-350, 2019.
- [18] D. Zhao, R. Bai, C. Shen, and X. Li, “Trajectory Planning Method of Point-to-Point Motion for SCARA Robot,” Computer Engineering, Vol.41, No.8, pp. 306-312, 2015 (in Chinese).
- [19] X. Cheng, L. Du, G. Yang, and B. Li, “Adaptive robust control of dynamic gas pressure in a vacuum servo system,” Vacuum, Vol.148, pp. 184-194, 2018.
- [20] L. Zhao, Y. Xia, Y. Yang, and Z. Liu, “Multicontroller Positioning Strategy for a Pneumatic Servo System Via Pressure Feedback,” IEEE Trans. on Industrial Electronics, Vol.64, No.6, pp. 4800-4809, 2017.
- [21] Y. Liu, T. Wang, G. Zhao, A. Wang, Y. Deng, and G. Li, “Pressure Control of Pneumatic Gravity Compensation System,” J. of Mechanical Engineering, Vol.54, Issue 16, pp. 212-219, 2018 (in Chinese).
- [22] J.-X. Xu and Z.-S. Hou, “Notes on Data-driven System Approaches,” Acta Automatica Sinica, Vol.35, Issue 6, pp. 668-675, 2009.
- [23] Z.-S. Hou, H.-R. Dong, and S.-T. Jin, “Model-free Adaptive Control with Coordinates Compensation for Automatic Car Parking Systems,” Acta Automatica Sinica, Vol.41, No.4, pp. 823-831, 2015 (in Chinese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.