Paper:
Analysis of Velocity Pattern of a Power-Assisted Mobile Robot
Yuki Ueno
Tokyo University of Technology
1404-1 Katakuramachi, Hachioji, Tokyo 192-0982, Japan

This paper aims to analyze the velocity pattern of a power-assisted mobile robot when the operator performs operation without any discomfort. Power-assist systems for mobile robots such as wheelchairs and conveyance carriers are extremely effective in alleviating the physical burden on operators when they carry heavy objects. Although the velocity control based power-assist system has an advantage that it can be easily realized, the problem lies in that the system becomes unstable when the operator has high stiffness. Variable impedance control based on impedance estimation of the operator is effective at solving this problem. To realize operator impedance estimation, it is necessary to know the intended robot’s motion of a person. In this study, as a preliminary step to estimate the operator’s impedance, the velocity pattern when the operator performs natural operation of the robot through the power-assist system is analyzed. The results confirm that the natural velocity pattern can be approximated by a velocity pattern connecting two minimum jerk trajectories.
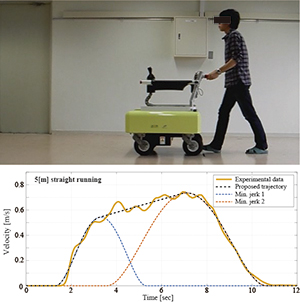
The velocity pattern when the operator performs natural operation of the robot through the power-assist system can be approximated by a velocity pattern connecting two minimum jerk trajectories
- [1] A. Kakimoto, H. Matsuda, and Y. Sekiguchi, “Development of power-assisted attendant-propelled wheelchair,” Proc. of the 19th Annual Int. Conf. of the IEEE Engineering in Medicine and Biology Society, Vol.4, pp. 1875-1876, 1997.
- [2] C. Zhu, M. Oda, M. Yoshioka, T. Nishikawa, S. Shimazu, and X. Luo, “Admittance control based walking support and power assistance of an omnidirectional wheelchair typed robot,” Proc. of IEEE Int. Conf. on Robotics and Biomimetics, pp. 381-386, 2010.
- [3] Y. Ueno, H. Kitagawa, K. Kakihara, T. Sakakibara, and K. Terashima, “Development of an Innovative Power-Assist Omni-Directional Mobile Bed Considering Operator’s Characteristics,” Int. J. Automation Technol., Vol.8, No.3, pp. 490-499, 2014.
- [4] S. Fujiwara, H. Kitano, H. Yamashita, H. Maeda, and H. Fukunaga, “Omnidirectional Cart with Power-assist System,” J. Robot. Mechatron., Vol.14, No.4, pp. 333-341, 2002.
- [5] S. Hoshino and K. Uchida, “Interactive Motion Planning for Mobile Robot Navigation in Dynamic Environments,” J. Adv. Comput. Intell. Intell. Inform., Vol.21, No.4, pp. 667-674, 2017.
- [6] H. Sasaki, T. Horiuchi, and S. Kato, “Experimental Study on Behavior Acquisition of Mobile Robot by Deep Q-Network,” J. Adv. Comput. Intell. Intell. Inform., Vol.21, No.5, pp. 840-848, 2017.
- [7] T. Tsumugiwa, Y, Fuchikami, A. Kamiyoshi, R. Yokogawa, and K. Yoshida, “Stability Analysis for Impedance Control of Robot in Human-Robot Cooperative Task System,” J. of Advanced Mechanical Design, Systems, and Manufacturing, Vol.1, No.1, pp. 113-121, 2007.
- [8] Y. Yamada, H. Konosu, T. Morizono, and Y. Umetani, “Proposal of Skill-Assist: a system of assisting human workers by reflecting their skills in positioning tasks,” Proc. of IEEE Int. Conf. on Systems, Man and Cybernetics, Vol.4, pp. 11-16, 1999.
- [9] K. Terashima, K. Watanabe, Y. Ueno, and Y. Masui, “Auto-tuning Control of Power Assist System Based on the Estimation of Operator’s Skill Level for Forward and Backward Driving of Omni-directional Wheelchair,” Proc. of Int. Conf. on Intelligent Robots and Systems, pp. 6046-6051, 2010.
- [10] R. Ikeura, T. Moriguchi, and K. Mizutani, “Optimal variable impedance control for a robot and its application to lifting an object with a human,” Proc. of 11th IEEE Int. Workshop on Robot and Human Interactive Communication, pp. 500-505, 2002.
- [11] T. Tsumigiwa, R. Yokogawa, and K. Hara, “Variable Impedance Control Based on Estimation of Human Arm Stiffness for Human-Robot Cooperative Calligraphic Task,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 644-650, 2002.
- [12] M. M. Rahman, R. Ikeura, and K. Mizutani, “Investigating the Impedance Characteristics of Human Arm for Development of Robots to Co-operate with Human Operators,” Proc. of IEEE Int. Conf. on Systems, Man and Cybernetics, Vol.2, pp. 676-681, 1999.
- [13] T. Flash and N. Hogan, “The Coordination of Arm Movements: An Experimentally Confirmed Mathematical Model,” The J. of Neuroscience, Vol.5, No.7, pp. 1688-1703, 1985.
- [14] Y. Ueno, T. Ohno, K. Terashima, H. Kitagawa, K. Kakihara, K. Funato, and K. Kakihara, “Novel Differential Drive Steering System with Energy Saving and Normal Tire Using Spur Gear for an Omni-directional Mobile Robot,” Proc. of Int. Conf. on Robotics and Automation, pp. 3763-3768, 2010.
- [15] Y. Maeda, T. Hara, and T. Arai, “Human-robot cooperative manipulation with motion estimation,” Proc. 2001 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Vol.4, pp. 2240-2245, 2001.
- [16] Y. Ueno, “Analysis of Velocity Pattern at the Power-Assist Operation of a Mobile Robot Without Discomfort Operation,” The Joint Int. Conf. of ISCIIA&ITCA2018, No.3A2-3-4, 2018.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.