Short Paper:
Trajectory Tracking and Control Algorithm for Precision Parallel Robot
Shanshan Chen
Mechanical and Electrical College, Chongqing College of Electronic Engineering
Shapingba District, Chongqing 401331, China

When the state of the robot reaches the smooth sliding plane, the current algorithm will generate high-frequency chattering, resulting in larger tracking error and longer response time. To solve these problems, we have proposed a trajectory tracking and control algorithm based on exponential reaching rate. The coordinate system of parallel robot system is established, and the kinetic energy and potential energy of the system are calculated. The results are brought into the Lagarnge equation to find the dynamic model of the system. The power amplifier, electro-hydraulic servo valve, hydraulic cylinder and its load are taken as generalized controlled objects, and the hydraulic servo system model is established. The exponential approaching rate is introduced to design the dynamics model and the trajectory tracking sliding controller of the hydraulic servo system model. By adjusting the upper and lower bounds of the external disturbance of the controller, the control rate is changed, the buffeting occurrence is reduced, and the response time is shortened, to realize the low error tracking of any trajectory of the robot. The experimental results show that the trajectory of the robot can be adjusted quickly and the desired trajectory is better tracked by the end.
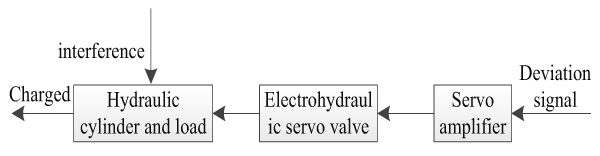
Diagram of generalized controlled object structure
- [1] L. Li, Y. H. Liu, T. Jiang, W. Kai, et al., “Adaptive trajectory tracking of nonholonomic mobile robots using vision-based position and velocity estimation,” IEEE Trans. on Cybernetics, Vol.48, No.2, pp. 571-582, 2018.
- [2] G. Chen, T. T. Gao, Q. W. Jia, et al., “Trajectory tracking control for nonholonomic mobile robots with unknown parameters and bounded disturbance,” Control Theory & Applications, Vol.32, No.4, pp. 491-496, 2015.
- [3] J. Jin and Y. N. Wang, “Fuzzy CMAC-based trajectory tracking control for nonholonomic mobile robot,” Computer Engineering and Applications, Vol.51, No.1, pp. 54-58, 2015.
- [4] K. Y. Liu and J. W. Leng “The Study on the Desired Trajectory Tracking Control of Quadrotor UAV,” Computer Simulation, Vol.34, No.5, pp. 103-107, 2017.
- [5] G. Yang, X. Deng, and C. Liu, “Facial expression recognition model based on deep spatiotemporal convolutional neural networks,” Zhongnan Daxue Xuebao (Ziran Kexue Ban)/J. of Central South University (Science and Technology), Vol.47, No.7, pp. 2311-2319, 2016.
- [6] G. Yang, Y. Zhang, J. Yang, et al., “Automated classification of brain images using wavelet-energy and biogeography-based optimization,” Multimedia Tools & Applications, Vol.75, No.23, pp. 15601-15617, 2016.
- [7] S. Tatsumi, M. Hariyama, and N. Ikoma, “Evaluation of an OpenCL-Based FPGA Platform for Particle Filter,” J. Adv. Comput. Intell. Intell. Inform., Vol.20, No.5, pp. 743-754, 2016.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.