Paper:
Development of a Roly-Poly Toy-Like Robot for Inspecting Floor Panels of Oil Tanks: Dynamic Modeling and Simulation for Deriving Robot Attitudes in Liquid Environment
Takuto Yokoyama*, Atsushi Kakogawa*
 , and Shigeo Hirose**
, and Shigeo Hirose**
*Department of Robotics, College of Science and Engineering, Ritsumeikan University
1-1-1 Nojihigashi, Kusatsu, Shiga 525-8577, Japan
**Hyper-Environment Robots Laboratory (HERO Lab.), Hakusan Corporation
1-6-4 Osaki, Shinagawa-ku, Tokyo 141-0032, Japan

This study proposes a robot that can crawl through the bottom of tanks and measure the thickness of its floor plate using an ultrasonic sensor. To prevent the robot from toppling because of the fluid resistance of the oil and to direct the transducer of the ultrasonic sensor perpendicular to the floor plate, a design inspired by a roly-poly toy was implemented. This ensured that the robot remained upright owing to the separation of its center of gravity and center of buoyancy. However, although this structure makes the robot resistant to toppling, it makes it susceptible to tilting owing to fluid resistance. Therefore, a simulator was developed, as part of this project, to estimate the robot’s posture in liquid. Finally, experiments were conducted in an indoor water pool under the assumption of the oil tank to compare the postures estimated by the simulator and actual posture.
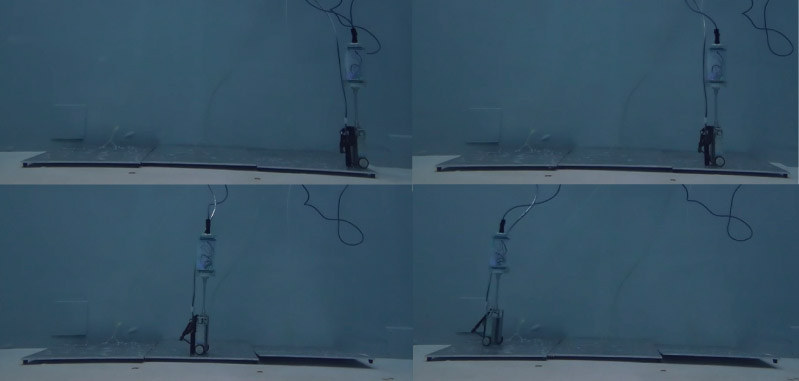
Experiment of Tumbler-1 measuring thickness of aluminum plate underwater
- [1] G. Penney, “In-Service Aboveground Storage Tank Inspection and Cleaning Robotics,” J. of High Pressure Institute of Japan, Vol.49, Issue 6, pp. 281-286, 2011. https://doi.org/10.11181/hpi.49.281
- [2] Kansai X Rays Inc., “Case Studies on the Application of Ultrasonic Continuous Thickness Measurement Technology for Tanks and Pipelines,” Safety & Tomorrow, Vol.149, pp. 26-30, Hazardous Materials Safety Techniques Association, 2013 (in Japanese).
- [3] R. Fernández, E. González, V. Feliú, and A. G. Rodríguez, “A wall climbing robot for tank inspection. An autonomous prototype,” 36th Annual Conf. of Industrial Electronics Society (IECON 2010), pp. 1424-1429, 2010. https://doi.org/10.1109/IECON.2010.5675473
- [4] L. P. Kalra, J. Gu, and M. Meng, “A Wall Climbing Robot for Oil Tank Inspection,” 2006 IEEE Int. Conf. on Robotics and Biomimetics, pp. 1523-1528, 2006. https://doi.org/10.1109/ROBIO.2006.340155
- [5] A. San-Millan, “Design of a teleoperated wall climbing robot for oil tank inspection,” 2015 23rd Mediterranean Conf. on Control and Automation (MED), pp. 255-261, 2015. https://doi.org/10.1109/MED.2015.7158759
- [6] W. Hua, Y. Chen, X. Zhao, J. Yang, H. Chen, Z. Wu, and G. Fang, “Research on a Corrosion Detection Method for Oil Tank Bottoms Based on Acoustic Emission Technology,” Sensors, Vol.24, Issue 10, Article No.3053, 2024. https://doi.org/10.3390/s24103053
- [7] E. Hodaei, M. Javadi, A. Broumandnia, and H. Sadeghi, “Evaluation of Acoustic Emission Inspection of Oil Tank Floor via Tank Bottom Plates Thickness Measurement,” J. of Mechanical Research and Application, Vol.4, Issue 3, pp. 37-44, 2012. https://sanad.iau.ir/Journal/jmra/Article/1055740
- [8] H. Sakamoto, K. Sekine, M. Maeda, and H. Suzuki, “Development of Improved AE Evaluation Technique for Corrosion Damage in Bottom Plates of Above-ground Oil Tanks in Service,” J. of the Japan Petroleum Institute, Vol.56, Issue 5, pp. 298-303, 2013. https://doi.org/10.1627/jpi.56.298
- [9] T. W. McLain and S. M. Rock, “Experiments in the Hydrodynamic Modeling of an Underwater Manipulator,” Proc. of Symp. on Autonomous Underwater Vehicle Technology, pp. 463-469, 1996. https://doi.org/10.1109/AUV.1996.532448
- [10] T. Ura and S. Takagawa, “Kaichu Robot Souran,” Seizando, 1994 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.