Paper:
Data-Driven Design for a Two-Degree-of-Freedom Control Systems Based on a Specified Stability Margin
Natsuki Kawaguchi, Sae Fujita, and Takao Sato

Graduate School of Engineering, University of Hyogo
2167 Shosha, Himeji, Hyogo 671-2280, Japan

Data-driven control is considered a practical design method for control systems. This method enables the direct tuning of controller parameters using only input-output data without requiring plant identification. In several conventional studies, data-driven control was expanded to a two-degree-of-freedom (2DOF) control system to consider responsiveness and robustness. The purpose of this study is to improve both the disturbance and setpoint responses in 2DOF control systems with one-shot controller tuning. An optimal controller satisfying the desired performance was directly obtained by specifying the stability margin as a constraint condition. The frequency characteristics of the plant were estimated using input-output data to confirm that the condition was fulfilled. Finally, a numerical example was presented to demonstrate the effectiveness of the proposed method.
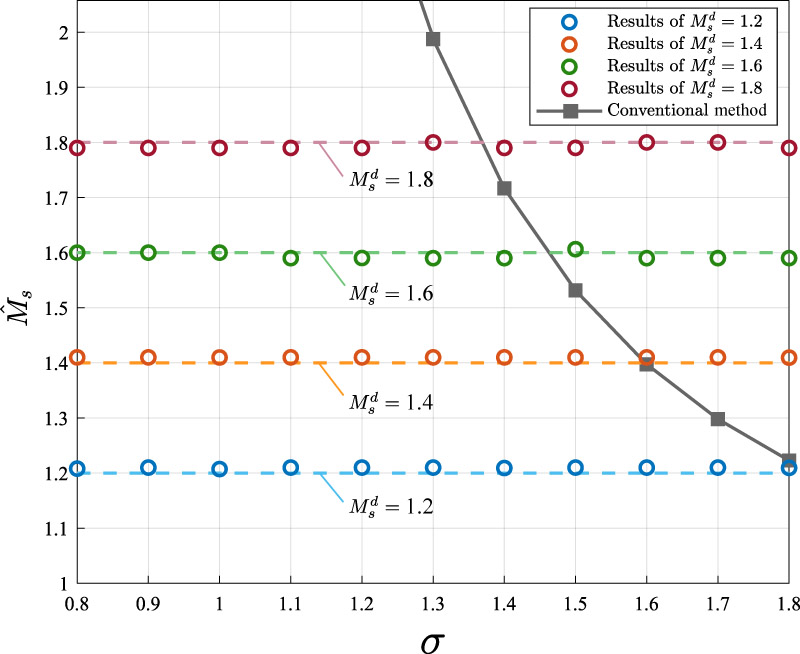
Simulation result of proposed method and trade-off curve
- [1] O. Kaneko and T. Yamamoto, “Direct Design and Tuning Based on Closed Loop Data for Control Systems,” J. of The Society of Instrument and Control Engineers, Vol.52, No.10, pp. 841-846, 2013 (in Japanese). https://doi.org/10.11499/sicejl.52.841
- [2] O. Kaneko, “Introduction to Data-Driven Control,” Corona Publishing Co., Ltd., 2024 (in Japanese).
- [3] H. Hjalmarsson, M. Gevers, S. Gunnarsson, and O. Lequin, “Iterative Feedback Tuning: Theory and Applications,” IEEE Control Systems Magazine, Vol.18, No.4, pp. 26-41, 1998. https://doi.org/10.1109/37.710876
- [4] M. C. Campi, A. Lecchini, and S. M. Savaresi, “Virtual Reference Feedback Tuning: a Direct Method for the Design of Feedback Controllers,” Automatica, Vol.38, No.8, pp. 1337-1346, 2002. https://doi.org/10.1016/S0005-1098(02)00032-8
- [5] S. Soma, O. Kaneko, and T. Fujii, “A new method of controller parameter tuning based on input-output data – Fictitious Reference Iterative Tuning (FRIT) –,” IFAC Workshop on Adaptation and Learning in Control and Signal Processing, and IFAC Workshop on Periodic Control Systems, Vol.37, No.12, pp. 789-794, 2004. https://doi.org/10.1016/S1474-6670(17)31566-5
- [6] H. Si and O. Kaneko, “FRIT of Internal Model Controllers for Poorly Damped Linear Time Invariant Systems: Kautz Expansion Approach,” J. Robot. Mechatron., Vol.28, No.5, pp. 745-751, 2016. https://doi.org/10.20965/jrm.2016.p0745
- [7] T. Yamamoto, “Design of Data-Orient ed PID Control Systems,” Morikita Publishing Co., Ltd., 2020 (in Japanese).
- [8] O. Kaneko, Y. Yamashina, and S. Yamamoto, “Fictitious Reference Tuning of the Feed-Forward Controller in a Two-Degree-of-Freedom Control System,” SICE J. of Control, Measurement, and System Integration, Vol.4, No.1, pp. 55-62, 2011. https://doi.org/10.9746/jcmsi.4.55
- [9] K. Hamamoto, T. Fukuda, and T. Sugie, “Iterative Feedback Tuning of Controllers for a Two-Mass-Spring System with Friction,” Control Engineering Practice, Vol.11, No.9, pp. 1061-1068, 2003. https://doi.org/10.1016/S0967-0661(02)00229-0
- [10] A. Lecchini, M. C. Campi, and S. M. Savaresi, “Virtual Reference Feedback Tuning for Two Degree of Freedom Controllers,” Int. J. of Adaptive Control and Signal Processing, Vol.16, pp. 355-371, 2002. https://doi.org/10.1002/acs.711
- [11] T. Sakata, O. Kaneko, and T. Fujii, “Parameter Tuning of Two-degree of Freedom Controllers Using FRIT for the Tracking Property and the Feedback Properties,” Trans. of the Institute of Systems, Control and Information Engineers, Vol.20, No.11, pp. 419-429, 2007 (in Japanese). https://doi.org/10.5687/iscie.20.419
- [12] T. Sakaki, S. Yahagi, and I. Kajiwara, “Two-Degree-of-Freedom Controller Design Based on a Data-Driven Estimation Approach,” IEEE Access, Vol.10, pp. 120475-120491, 2022. https://doi.org/10.1109/ACCESS.2022.3221415
- [13] A. Sakaki, T. Kinoshita, and T. Yamamoto, “Design of a Data-Driven Two-Degree-of-Freedom Control System Considering Robustness,” 2018 15th Int. Conf. on Control, Automation, Robotics and Vision, pp. 389-393, 2018. https://doi.org/10.1109/ICARCV.2018.8580631
- [14] Y. Matsui, T. Kimura, and K. Nakano, “Plant Model Analysis Based on Closed-Loop Step Response Data,” 2010 IEEE Int. Conf. on Control Applications, pp. 677-682, 2010. https://doi.org/10.1109/CCA.2010.5611309
- [15] Y. Matsui, H. Ayano, and K. Nakano, “Parametric Plant Modeling Using One-Shot Closed-Loop Transient Response Data,” Proc. 11th Int. Conf. Electrical Eng./Electronics Computer Telecommunications and Information Technology, pp. 1-6, 2014. https://doi.org/10.1109/ECTICon.2014.6839725
- [16] Y. Maeda, H. Tachibana, and M. Iwasaki, “Comparative Evaluations of Frequency Response Analysis Methods for Fast and Precise Point-to-Point Position Control,” 2018 IEEE 15th Int. Workshop on Advanced Motion Control, pp. 437-442, 2018. https://doi.org/10.1109/AMC.2019.8371133
- [17] Y. Matsui, H. Ayano, S. Masuda, and K. Nakano, “Frequency Characteristic Estimation of Transient Response Signals with Non-Zero Steady-State Values,” IEEJ Trans. on Electronics, Information and Systems, Vol.143, No.3, pp. 250-257, 2023 (in Japanese). https://doi.org/10.1541/ieejeiss.143.250
- [18] T. Yamamoto and I. Mizumoto, “Control of Linear Systems,” Asakura Publishing Co., Ltd., 2015 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.