Development Report:
Introduction to the Simulation Disaster Challenge of World Robot Summit Harsh Environment F-REI Challenge Pre-Tournament Event
Keita Nakamura*1, Kenta Suzuki*2, Eiichiro Kaneko*3, Yoshitaka Abe*3, Masaru Shimizu*4
 , and Katsuji Oogane*3
, and Katsuji Oogane*3
*1Sapporo University
3-7-3-1 Nishioka, Toyohira-ku, Sapporo, Hokkaido 062-8520, Japan
*2Japan Atomic Energy Agency
1-22 Nakamaru, Yamadaoka, Naraha-machi, Futaba-gun, Fukushima 979-0513, Japan
*3Niigata Institute of Technology
1719 Fujihashi, Kashiwazaki, Niigata 945-1195, Japan
*4Chukyo University
101-2 Yagoto Honmachi, Showa-ku, Nagoya, Aichi 466-8666, Japan

This report presents the design and results of the Simulation Disaster Challenge held at the Fukushima Robot Test Field in October 2024 as part of the World Robot Summit Harsh Environment F-REI Challenge Pre-tournament event. In this challenge, a novel simulation environment was developed that enables safe and repeated evaluation of tasks under extreme conditions that are difficult to reproduce in the real world, while simultaneously simulating the complex and harsh environments of debris scattering and poor visibility that can be expected in actual plant disasters. This report first provides an overview of the history of major disaster-response robot simulation competitions conducted to date. Next, we report on the design of the competition course and results of the pre-tournament event. Furthermore, the competitive environment is examined as an educational resource based on real-world challenges, highlighting its applicability to STEM education. Finally, the current status of preparations for the main competition, scheduled for October 2025, is described.
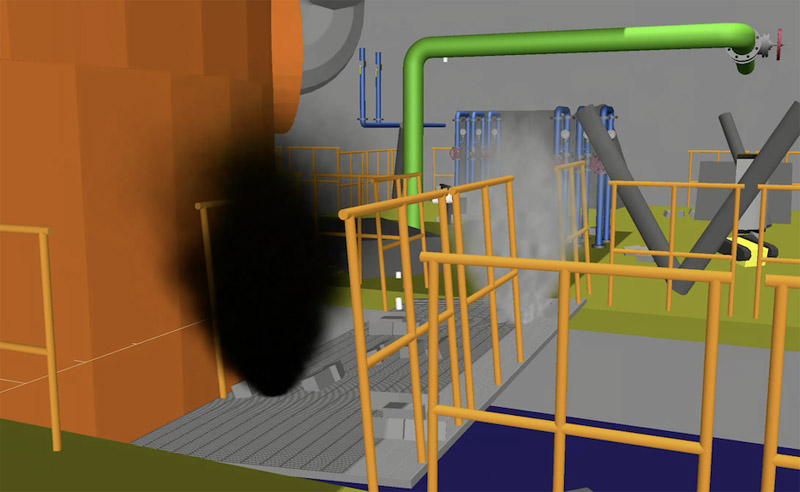
Simulation field for WRS 2025 Pre-Tournament
- [1] K. Iagnemma and M. Buehler, “Editorial for Journal of Field Robotics-special issue on the DARPA grand challenge,” J. of Field Robotics, Vol.23, No.9, pp. 655-656, 2006. https://doi.org/10.1002/rob.20154
- [2] K. Nagatani, S. Kiribayashi, Y. Okada, S. Tadokoro, T. Nishimura, T. Yoshida, E. Koyanagi, and Y. Hada, “Redesign of rescue mobile robot Quince,” 2011 IEEE Int. Symp. on Safety, Security, and Rescue Robotics, pp. 13-18, 2011. https://doi.org/10.1109/SSRR.2011.6106794
- [3] M. Honey, G. Pearson, and H. Schweingruber (Eds.), “STEM Integration in K-12 Education: Status, Prospects, and an Agenda for Research,” National Academies Press, 2014.
- [4] M. Okugawa, K. Oogane, M. Shimizu, Y. Ohtsubo, T. Kimura, T. Takahashi, and S. Tadokoro, “Proposal of inspection and rescue tasks for tunnel disasters – Task development of Japan virtual robotics challenge,” 2015 IEEE Int. Symp. on Safety, Security, and Rescue Robotics (SSRR), 2015. https://doi.org/10.1109/SSRR.2015.7443005
- [5] M. Shimizu, M. Okugawa, K. Oogane, Y. Ohtsubo, T. Kimura, T. Takahashi, and S. Tadokoro, “Standard Rescue Tasks Based on the Japan Virtual Robotics Challenge,” RoboCup 2016: Robot World Cup XX, pp. 440-451, 2017. https://doi.org/10.1007/978-3-319-68792-6_37
- [6] S. Tadokoro, T. Kimura, M. Okugawa, K. Oogane, H. Igarashi, Y. Ohtsubo, N. Sato, M. Shimizu, S. Suzuki, T. Takahashi, S. Nakaoka, M. Murata, M. Takahashi, Y. Morita, and E. M. Rooney, “The World robot summit disaster robotics category – achievements of the 2018 preliminary competition,” Advanced Robotics, Vol.33, No.17, pp. 854-875, 2019. https://doi.org/10.1080/01691864.2019.1627244
- [7] S. Tadokoro, T. Kimura, K. Oogane, Y. Ohtsubo, M. Okugawa, N. Sato, M. Shimizu, S. Suzuki, T. Aoki, Y. Okada, S. Chikushi, Y. Toda, H. Nagano, Y. Hasumi, D. Yamaguchi, M. Murata, M. Takahashi, Y. Morita, and E. M. Rooney, “An Overview and Outcome of World Robot Summit 2020 Fukushima,” J. of the Robotics Society of Japan, Vol.40, No.6, pp. 475-483, 2022. https://doi.org/10.7210/jrsj.40.475
- [8] K. Oogane, Y. Ohtsubo, and N. Sato, “Task Setting and Performance Evaluation Methods of WRS Disaster Robotics Category,” J. of The Society of Instrument and Control Engineers, Vol.62, No.5, pp. 264-267, 2023. https://doi.org/10.11499/sicejl.62.264
- [9] S. Nakaoka, “Choreonoid: Extensible virtual robot environment built on an integrated GUI framework,” 2012 IEEE/SICE Int. Symp. on System Integration, pp. 79-85, 2012. https://doi.org/10.1109/SII.2012.6427350
- [10] K. Hashimoto, T. Matsuzawa, X. Sun, T. Fujiwara, X. Wang, Y. Konishi, N. Sato, T. Endo, F. Matsuno, N. Kubota, Y. Toda, N. Takesue, K. Wada, T. Mouri, H. Kawasaki, A. Namiki, Y. Liu, A. Takanishi, and S. Tadokoro, “WAREC-1 – A Four-Limbed Robot with Advanced Locomotion and Manipulation Capabilities,” S. Tadokoro (Ed.), “Disaster Robotics: Results from the ImPACT Tough Robotics Challenge,” pp. 327-397, Springer, 2019. https://doi.org/10.1007/978-3-030-05321-5_7
- [11] H. Yoshinada, K. Kurashiki, D. Kondo, K. Nagatani, S. Kiribayashi, M. Fuchida, M. Tanaka, A. Yamashita, H. Asama, T. Shibata, M. Okutomi, Y. Sasaki, Y. Yokokohji, M. Konyo, H. Nagano, F. Kanehiro, T. Sugihara, G. Ishigami, S. Ozaki, K. Suzumori, T. Ide, A. Yamamoto, K. Hioki, T. Oomichi, S. Ashizawa, K. Tadakuma, T. Takamori, T. Kimura, R. R. Murphy, and S. Tadokoro, “Dual-Arm Construction Robot with Remote-Control Function,” S. Tadokoro (Ed.), “Disaster Robotics: Results from the ImPACT Tough Robotics Challenge,” pp. 195-264, Springer, 2019. https://doi.org/10.1007/978-3-030-05321-5_5
- [12] K. Nakamura, K. Tohashi, Y. Funayama, H. Harasawa, and J. Ogawa, “Dual-arm robot teleoperation support with the virtual world,” Artificial Life and Robotics, Vol.25, pp. 286-293, 2020. https://doi.org/10.1007/s10015-020-00587-6
- [13] K. Suzuki and K. Kawabata, “HAIROWorldPlugin: A Choreonoid plugin for virtually configuring decommissioning task environment for the robots,” 2021 IEEE/SICE Int. Symp. on System Integration, pp. 833-834, 2021. https://doi.org/10.1109/IEEECONF49454.2021.9382771
- [14] F. Wang, G. Chen, and K. Hauser, “Robot button pressing in human environment,” 2018 IEEE Int. Conf. on Robotics and Automation, pp. 7173-7180, 2018. https://doi.org/10.1109/ICRA.2018.8463180
- [15] R. O. Faria, F. Kucharczak, G. M. Freitas, A. C. Leite, F. Lizarralde, M. Galassi, and P. J. From, “A Methodology for Autonomous Robotic Manipulation of Valves Using Visual Sensing,” IFAC-PapersOnLine, Vol.48, No.6, pp. 221-228, 2015. https://doi.org/10.1016/j.ifacol.2015.08.035
- [16] Y. Yamauchi, Y. Maezawa, Y. Ambe, M. Konyo, K. Tadakuma, and S. Tadokoro, “Development of a remotely controllable 4 m long aerial-hose-type firefighting robot,” Frontiers in Robotics and AI, Vol.10, Article No.1273676, 2023. https://doi.org/10.3389/frobt.2023.1273676
- [17] Y. Chang, Y. Cheng, U. Manzoor, and J. Murray, “A review of UAV autonomous navigation in GPS-denied environments,” Robotics and Autonomous Systems, Vol.170, Article No.104533, 2023. https://doi.org/10.1016/j.robot.2023.104533
- [18] A. Eguchi, “Robotics as a learning tool for educational transformation,” Proc. of 4th Int. Workshop Teaching Robotics, Teaching With Robotics & 5th Int. Conf. Robotics in Education, pp. 27-34, 2014.
- [19] J. L. Kolodner, P. J. Camp, D. Crismond, B. Fasse, J. Gray, J. Holbrook, S. Puntambekar, and M. Ryan, “Problem-Based Learning Meets Case-Based Reasoning in the Middle-School Science Classroom: Putting Learning by Design™ Into Practice,” The J. of the Learning Sciences, Vol.12, No.4, pp. 495-547, 2003. https://doi.org/10.1207/S15327809JLS1204_2
- [20] J. R. Savery, “Overview of Problem-based Learning: Definitions and Distinctions,” Interdisciplinary J. of Problem-Based Learning, Vol.1, No.1, pp. 9-20, 2006. https://doi.org/10.7771/1541-5015.1002
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.