Research Paper:
Adaptive Visual Servoing Control of Tilt-Rotor Quadrotors Based on Thrust-Loss Modeling
Duo Wang† and Hajime Nobuhara

University of Tsukuba
1-1-1 Tennodai, Tsukuba, Ibaraki 305-8577, Japan
†Corresponding author

This paper introduces a novel robust visual servoing approach for tilt-rotor quadrotor systems designed to create airflow-free zones beneath the vehicle for precision agricultural spraying. We propose modeling the tilt-rotor dynamics as a thrust loss problem, where fixed rotor tilt angles directly reduce effective vertical thrust while complex aerodynamic couplings are treated as composite disturbances. Our integrated control framework combines a virtual camera-based robust observer with sliding mode control, adaptive thrust compensation, and image moment feedforward compensation to ensure stable visual servoing across various tilt angles. Theoretical stability analysis proves global asymptotic convergence of the closed-loop system using Lyapunov methods. Numerical simulations demonstrate effective control at tilt angles up to 40° with an optimal adaptation gain of γb=0.2, achieving 96.8% RMSE improvement from 1.8746 m to 0.0602 m under 20° tilt conditions. ROS Gazebo SITL simulations validate the thrust-loss modeling approach by demonstrating comparable performance between physical tilt-rotor unmanned aerial vehicles (UAVs) and conventional UAVs experiencing equivalent thrust loss, confirming the feasibility of the simplified modeling hypothesis. This work establishes a foundation for developing practical tilt-rotor UAVs that can minimize pesticide drift through deliberate airflow manipulation, addressing a critical limitation in current agricultural drone technology.
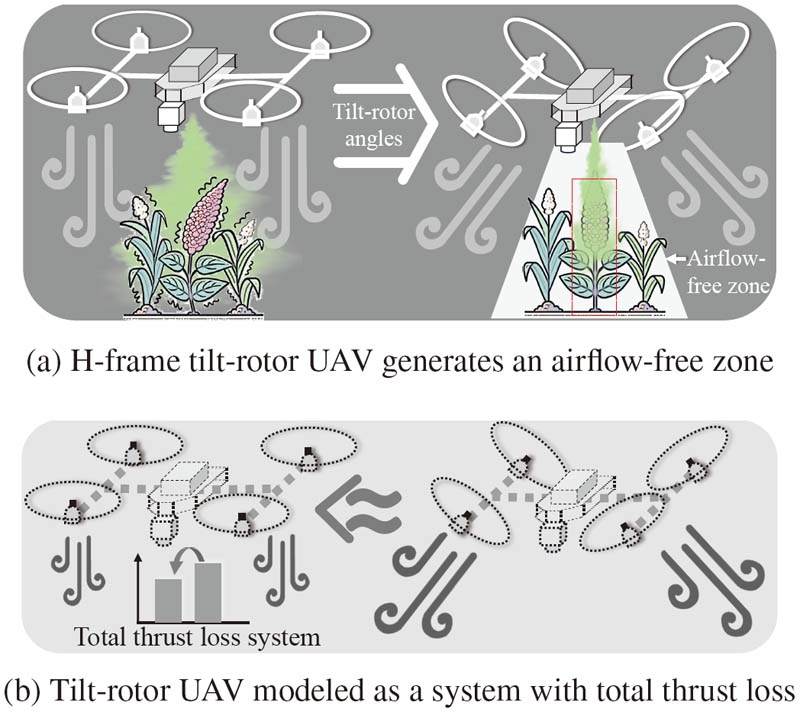
Airflow-free zone via thrust-loss model
- [1] A. Rejeb, A. Abdollahi, K. Rejeb, and H. Treiblmaier, “Drones in agriculture: A review and bibliometric analysis,” Computers and Electronics in Agriculture, Vol.198, Article No.107017, 2022. https://doi.org/10.1016/j.compag.2022.107017
- [2] C. Hiremath, N. Khatri, and M. P. Jagtap, “Comparative studies of knapsack, boom, and drone sprayers for weed management in soybean (Glycine max L.),” Environmental Research, Vol.240, Part 1, Article No.117480, 2024. https://doi.org/10.1016/j.envres.2023.117480
- [3] S. Chen et al., “Effect of droplet size parameters on droplet deposition and drift of aerial spraying by using plant protection UAV,” Agronomy, Vol.10, No.2, Article No.195, 2020. https://doi.org/10.3390/agronomy10020195
- [4] D. Wang and H. Nobuhara, “Robust visual servoing with adaptive thrust compensation for tilt-rotor quadrotor system,” 2025 SICE Festival with Annual Conf., 2025.
- [5] W. Qin and P. Chen, “Analysis of the research progress on the deposition and drift of spray droplets by plant protection UAVs,” Scientific Reports, Vol.13, Article No.14935, 2023. https://doi.org/10.1038/s41598-023-40556-0
- [6] Y. Zhan et al., “Influence of the downwash airflow distribution characteristics of a plant protection UAV on spray deposit distribution,” Biosystems Engineering, Vol.216, pp. 32-45, 2022. https://doi.org/10.1016/j.biosystemseng.2022.01.016
- [7] K. Chang, S. Chen, M. Wang, X. Xue, and Y. Lan, “Numerical simulation and verification of rotor downwash flow field of plant protection UAV at different rotor speeds,” Frontiers in Plant Science, Vol.13, Article No.1087636, 2023. https://doi.org/10.3389/fpls.2022.1087636
- [8] S. Wongsuk et al., “Spray performance and control efficacy against pests in paddy rice by UAV-based pesticide application: Effects of atomization, UAV configuration and flight velocity,” Pest Management Science, Vol.80, No.4, pp. 2072-2084, 2024.
- [9] R. Morishita, S. Kawai, and H. Nobuhara, “Downwash reduction drone with adaptive rotors and its 3D aerodynamic analysis and stabilization control,” IEEE Access Vol.12, pp. 22832-22840, 2024.
- [10] G. G. Rigatos, M. Abbaszadeh, B. Sari, and J. Pomares, “Nonlinear optimal control for UAVs with tilting rotors,” Int. J. of Intelligent Unmanned Systems, Vol.12, No.1, pp. 32-104, 2024. https://doi.org/10.1108/IJIUS-02-2023-0018
- [11] Z. Liang, L. Fan, G. Wen, and Z. Xu, “Design, modeling, and control of a composite tilt-rotor unmanned aerial vehicle,” Drones, Vol.8, No.3, Article No.102, 2024. https://doi.org/10.3390/drones8030102
- [12] S. Bouabdallah, A. Noth, and R. Siegwart, “PID vs LQ control techniques applied to an indoor micro quadrotor,” 2004 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Vol.3, pp. 2451-2456, 2004. https://doi.org/10.1109/IROS.2004.1389776
- [13] P. Castillo, R. Lozano, and A. E. Dzul, “Modelling and control of mini-flying machines,” Springer, 2005. https://doi.org/10.1007/1-84628-179-2
- [14] A. Levant, “Higher-order sliding modes, differentiation and output-feedback control,” Int. J. of Control, Vol.76, Nos.9-10, pp. 924-941, 2003. https://doi.org/10.1080/0020717031000099029
- [15] W. Zhou, K. Yin, R. Wang, and Y. Wang, “Design of attitude control system for UAV based on feedback linearization and adaptive control,” Mathematical Problems in Engineering, Vol.2014, Article No.492680, 2014. https://doi.org/10.1155/2014/492680
- [16] Q. Shu, P. Yang, Y. Wang, and B. Ma, “Fault tolerant predictive control based on discrete-time sliding mode observer for quadrotor UAV,” J. Adv. Comput. Intell. Intell. Inform., Vol.22, No.4, pp. 498-505, 2018. https://doi.org/10.20965/jaciii.2018.p0498
- [17] H. Xie, G. Fink, A. F. Lynch, and M. Jagersand, “Adaptive visual servoing of UAVs using a virtual camera,” IEEE Trans. on Aerospace and Electronic Systems, Vol.52, No.5, pp. 2529-2538, 2016. https://doi.org/10.1109/TAES.2016.15-0155
- [18] Z. Chen and H. Jia, “Design of flight control system for a novel tilt-rotor UAV,” Complexity, Vol.2020, Article No.4757381, 2020. https://doi.org/10.1155/2020/4757381
- [19] H. Pan, H. Wong, V. Kapila, and M. S. de Queiroz, “Experimental validation of a nonlinear backstepping liquid level controller for a state coupled two tank system,” Control Engineering Practice, Vol.13, No.1, pp. 27-40, 2005. https://doi.org/10.1016/j.conengprac.2003.12.019
- [20] K. Zhang, Y. Shi, and H. Sheng, “Robust nonlinear model predictive control based visual servoing of quadrotor UAVs,” IEEE/ASME Trans. on Mechatronics, Vol.26, No.2, pp. 700-708, 2021. https://doi.org/10.1109/TMECH.2021.3053267
- [21] F. Chaumette and S. Hutchinson, “Visual servo control. I. Basic approaches,” IEEE Robotics & Automation Magazine, Vol.13, No.4, pp. 82-90, 2006. https://doi.org/10.1109/MRA.2006.250573
- [22] O. Tahri and F. Chaumette, “Point-based and region-based image moments for visual servoing of planar objects,” IEEE Trans. on Robotics, Vol.21, No.6, pp. 1116-1127, 2005. https://doi.org/10.1109/TRO.2005.853500
- [23] D. Zheng et al., “Image-based visual servoing of a quadrotor using virtual camera approach,” IEEE/ASME Trans. on Mechatronics, Vol.22, No.2, pp. 972-982, 2017. https://doi.org/10.1109/TMECH.2016.2639531
- [24] G. Fink, H. Xie, A. F. Lynch, and M. Jagersand, “Dynamic visual servoing for a quadrotor using a virtual camera,” Unmanned Systems Vol.5, No.1, pp. 1-17, 2017. https://doi.org/10.1142/S2301385017500017
- [25] H. Liu, Y. Lyu, and W. Zhao, “Robust visual servoing formation tracking control for quadrotor UAV team,” Aerospace Science and Technology, Vol.106, Article No.106061, 2020. https://doi.org/10.1016/j.ast.2020.106061
- [26] H. Xie, K. H. Low, and Z. He, “Adaptive visual servoing of unmanned aerial vehicles in GPS-denied environments,” IEEE/ASME Trans. on Mechatronics, Vol.22, No.6, pp. 2554-2563, 2017. https://doi.org/10.1109/TMECH.2017.2755669
- [27] R. Mebarki, V. Lippiello, and B. Siciliano, “Nonlinear visual control of unmanned aerial vehicles in GPS-denied environments,” IEEE Trans. on Robotics Vol.31, No.4, pp. 1004-1017, 2015. https://doi.org/10.1109/TRO.2015.2451371
- [28] T. Qin, P. Li, and S. Shen, “VINS-Mono: A robust and versatile monocular visual-inertial state estimator,” IEEE Trans. on Robotics, Vol.34, No.4, pp. 1004-1020, 2018. https://doi.org/10.1109/TRO.2018.2853729
- [29] C. Collewet, E. Marchand, and F. Chaumette, “Visual servoing set free from image processing,” 2008 IEEE Int. Conf. on Robotics and Automation, pp. 81-86, 2008. https://doi.org/10.1109/ROBOT.2008.4543190
- [30] E. Malis, F. Chaumette, and S. Boudet, “2 1/2 D visual servoing,” IEEE Trans. on Robotics and Automation, Vol.15, No.2, pp. 238-250, 1999. https://doi.org/10.1109/70.760345
- [31] P. Hu, R. Zhang, J. Yang, and L. Chen, “Development status and key technologies of plant protection UAVs in China: A review,” Drones, Vol.6, No.11, Article No.354, 2022. https://doi.org/10.3390/drones6110354
- [32] H. Chen, Y. Lan, B. K. Fritz, W. C. Hoffmann, and S. Liu, “Review of agricultural spraying technologies for plant protection using unmanned aerial vehicle (UAV),” Int. J. of Agricultural and Biological Engineering, Vol.14, No.1, pp. 38-49, 2021. https://doi.org/10.25165/j.ijabe.20211401.5714
- [33] Y. Tang, C. Chen, A. C. Leite, and Y. Xiong, “Precision control technology and application in agricultural pest and disease control,” Frontiers in Plant Science, Vol.14, Article No.1163839, 2023. https://doi.org/10.3389/fpls.2023.1163839
- [34] L. Meier, D. Honegger, and M. Pollefeys, “PX4: A node-based multithreaded open source robotics framework for deeply embedded platforms,” 2015 IEEE Int. Conf. on Robotics and Automation, pp. 6235-6240, 2015. https://doi.org/10.1109/ICRA.2015.7140074
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.