Research Paper:
A PID Control System for Lower-Limb Rehabilitation Robot with a Function for Pedal Torque Estimation
Yue Jing*1,*2,*3
 , Zewen Wang*4
, Qiwei Wu*5
, Jinhua She*5,†
, and Seiichi Kawata*1,*2,*3
, Zewen Wang*4
, Qiwei Wu*5
, Jinhua She*5,†
, and Seiichi Kawata*1,*2,*3
*1School of Automation, China University of Geosciences
388 Lumo Road, Hongshan, Wuhan 430074, China
*2Hubei Key Laboratory of Advanced Control and Intelligent Automation for Complex Systems
388 Lumo Road, Hongshan, Wuhan 430074, China
*3Engineering Research Center of Intelligent Technology for Geo-Exploration, Ministry of Education
388 Lumo Road, Hongshan, Wuhan 430074, China
*4School of Mechanical Engineering and Electronic Information, China University of Geosciences
388 Lumo Road, Hongshan, Wuhan 430074, China
*5Graduate School of Engineering, Tokyo University of Technology
1404-1 Katakuramachi, Hachioji, Tokyo 192-0982, Japan
†Corresponding author

This article presents a proportional integral derivative (PID) control system for lower-limb rehabilitation robot that not only features satisfactory control performance for the pedal angle but also provides a function for pedal torque estimation. Nonlinear state feedback simplifies the stability analysis and control system design. The stability condition of the closed-loop system is derived based on a Lyapunov function. The PID controller ensures that the pedal angle tracks the reference trajectory. The equivalent input disturbance (EID) method in the control system was compared with the disturbance observer (DOB) and extended state observer (ESO) methods in terms of pedal torque estimation performance. The simulation results indicated that the EID method achieved a root mean square error of 0.37 N·m with 47.6% and 51.8% improvements over the DOB and ESO methods.
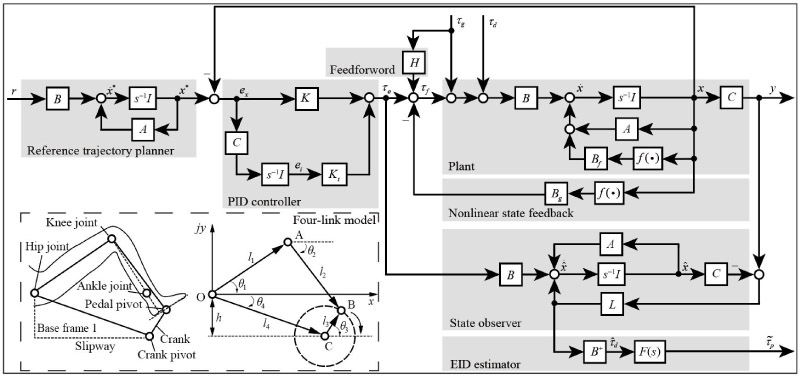
PID-EID control system for LLRRs
- [1] R. Chen, Y. Zhang, and X. Wang, “Treatment effects of low-frequency repetitive transcranial magnetic stimulation combined with motor relearning procedure on spasticity and limb motor function in stroke patients,” Frontiers in Neurology, Vol.14, Article No.1213624, 2023. https://doi.org/10.3389/fneur.2023.1213624
- [2] Q. Wu and Y. Chen, “Variable admittance time-delay control of an upper limb rehabilitation robot based on human stiffness estimation,” Mechatronics, Vol.90, Article No.102935, 2023. https://doi.org/10.1016/j.mechatronics.2022.102935
- [3] S. Kuroda, J. She, S. Nakamuro, R. Wang, D. Chugo, K. Ishiguro, H. Sakai, and H. Hashimoto, “Selecting pedal load for lower-limb rehabilitation based on the combination of muscle synergy and Fourier series,” J. Adv. Comput. Intell. Intell. Inform., Vol.28, No.3, pp. 595-605, 2024. https://doi.org/10.20965/jaciii.2024.p0595
- [4] Z. Zhu, L. Liu, W. Zhang, C. Jiang, and J. Li, “Design and motion control of exoskeleton robot for paralyzed lower limb rehabilitation,” Front Neurosci., Vol.18, Article No.1355052, 2024. https://doi.org/10.3389/fnins.2024.1355052
- [5] L. Liu, J. Feng, J. Li, W. Chen, Z. Mao, and X. Tan, “Multi-layer CNN-LSTM network with self-attention mechanism for robust estimation of nonlinear uncertain systems,” Frontiers in Neuroscience, Vol.18, Article No.1379495, 2024. https://doi.org/10.3389/fnins.2024.1379495
- [6] L. Jiang, J. Zhao, F. Wang, Y. Zhou, W. Ge, and J. She, “Rehabilitation evaluation system for lower-limb rehabilitation robot,” J. Adv. Comput. Intell. Intell. Inform., Vol.27, No.4, pp. 691-699, 2023. https://doi.org/10.20965/jaciii.2023.p0691
- [7] Y. Wang, Y. Tian, Y. Guo, and H. Wang, “Active torque-based gait adjustment multi-level control strategy for lower limb patient-exoskeleton coupling system in rehabilitation training,” Mathematics and Computers in Simulation, Vol.215, pp. 357-381, 2023. https://doi.org/10.1016/j.matcom.2023.08.020
- [8] J. Jiang, Z. Gao, and G. Li, “A miniature elastic torque sensor for index finger exoskeletons,” IEEE Trans. on Instrumentation and Measurement, Vol.72, pp. 1-10, 2023. https://doi.org/10.1109/TIM.2023.3276514
- [9] S. Li, L. Zhang, Q. Meng, and H. Yu, “A real-time control method for upper limb exoskeleton based on active torque prediction model,” Bioengineering, Vol.10, No.12, Article No.1441, 2023. https://doi.org/10.3390/bioengineering10121441
- [10] J. C. Jaimes, A. D. Orjuela-Cañón, and A. A. G. Siqueira, “Ankle torque estimation based on disturbance observers for robotic rehabilitation,” J. of the Brazilian Society of Mechanical Sciences and Engineering, Vol.46, Article No.554, 2024. https://doi.org/10.1007/s40430-024-05132-1
- [11] J. Li, C. Lan, P. Liang, and M. Zhong, “Research on interactive force acquisition and active–passive mode determination of rehabilitation robot,” Measurement, Vol.220, Article No.1133407, 2023. https://doi.org/10.1016/j.measurement.2023.113340
- [12] H. Yu, S. Zheng, J. Wu, L. Sun, Y. Chen, and Z. Qin, “A new single-leg lower-limb rehabilitation robot: design, analysis and experimental evaluation,” Machines, Vol.11, No.4, Article No.447, 2023. https://doi.org/10.3390/machines11040447
- [13] L. Chen, S. Yang, X. Zhang, T. Li, Y. Long, and H. Pan, “Development of a capacitive force/torque sensor for lower limb rehabilitation robots for spasm detection,” IEEE Trans. on Instrumentation and Measurement, Vol.72, pp. 1-12, 2023. https://doi.org/10.1109/TIM.2023.3309370
- [14] Y. Huang, K. Chen, X. Zhang, K. Wang, and J. Ota, “Joint torque estimation for the human arm from sEMG using backpropagation neural networks and autoencoders,” Biomedical Signal Processing and Control, Vol.62, Article No.102051, 2020. https://doi.org/10.1016/j.bspc.2020.102051
- [15] Q. Zhang, L. Fang, Q. Zhang, and C. Xiong, “Simultaneous estimation of joint angle and interaction force towards sEMG-driven human-robot interaction during constrained tasks,” Neurocomputing, Vol.484, pp. 38-45, 2022. https://doi.org/10.1016/j.neucom.2021.05.113
- [16] T. Sittiruk, K. Sengchuai, A. Booranawong, and P. Phukpattaranont, “Implementation of a real-time force estimation system based on sEMG signals and gaussian process regression: Human-robot interaction in rehabilitation,” IEEE Access, Vol.13, pp. 13731-13747, 2025. https://doi.org/10.1109/ACCESS.2025.3529986
- [17] A. Phinyomark, S. Hirunviriya, C. Limsakul, and P. Phukpattaranont, “Evaluation of EMG feature extraction for hand movement recognition based on Euclidean distance and artificial neural networks,” IEEE Access, Vol.8, pp. 109184-109199, 2020.
- [18] J. Liu, Y. Wang, and Z. Zhang, “Challenges and opportunities in wearable EMG sensing: A review of nonlinearity and variability in signal processing,” IEEE Sensors J., Vol.22, No.3, pp. 2001-2012, 2022.
- [19] G. Li, X. Li, and Y. Zhang, “Real-time noise reduction for sEMG signals in prosthetic control applications,” IEEE Trans. on Biomedical Circuits and Systems, Vol.215, No.2, pp. 267-278, 2021.
- [20] A. Mohammadi and H. Dallali, “Chapter 5 - Disturbance observer applications in rehabilitation robotics: An overview,” Powered Prostheses, Academic Press, pp. 113-133, 2020. https://doi.org/10.1016/B978-0-12-817450-0.00005-5
- [21] J. She, K. Miyamoto, Q. Han, M. Wu, H. Hashimoto, and Q. Wang, “Generalized-extended-state-observer and equivalent-input-disturbance methods for active disturbance rejection: deep observation and comparison,” IEEE/CAA J. of Automatica Sinica, Vol.10, No.4, pp. 957-968, 2023. https://doi.org/10.1109/JAS.2022.105929
- [22] J. C. Yepes, S. Rúa, M. Osorio, V. Z. Pérez, J. Moreno, and M. J. Betancur, “Human-robot interaction torque estimation methods for a lower limb rehabilitation robotic system with uncertainties,” Applied Sciences, Vol.12, No.11, Article No.5529, 2022. https://doi.org/10.3390/app12115529
- [23] G. Sebastian, Z. Li, V. Crocher, D. Kremers, Y. Tan, and D. Oetomo, “Interaction force estimation using extended state observers: An application to impedance-based assistive and rehabilitation robotics,” IEEE Robotics and Automation Letters, Vol.4, No.2, pp. 1156-1161, 2019. https://doi.org/10.1109/LRA.2019.2894908
- [24] C. Aoun and H. Moncayo, “Disturbance observer-based reinforcement learning control and the application to a nonlinear dynamic system,” AIAA SCITECH, 2022. https://doi.org/10.2514/6.2022-1586
- [25] R. He, J. Yang, B. Tang, and Q. Sun, “Research advances in the treatment of essential tremor,” Chinese J. of Neurology, Vol.54, No.4, pp. 404-408, 2021.
- [26] J. Cortez, J. Lee, J. Kim, and S . Y. Chang, “Thalamo-cortical network is associated with harmaline-induced tremor in rodent model,” Experimental Neurology, Vol.358, Article No.114210, 2022. https://doi.org/10.1016/j.expneurol.2022.114210
- [27] H. Abboud, A. Ahmed, and H. H. Fernandez, “Essential tremor: choosing the right management plan for your patient,” Mechanism and Machine Theory, Vol.78, No.12, pp. 821-828, 2011. https://doi.org/10.3949/ccjm.78a.10178
- [28] S. Wang, Y. Gao, J. Zhao, and H. Cai, “Adaptive sliding bandlimited multiple Fourier linear combiner for estimation of pathological tremor,” Biomed. Signal Process. Control, Vol.10, pp. 260-274, 2014. https://doi.org/10.1016/j.bspc.2013.10.004
- [29] Y. Zhou, Z. Habibollahi, A. Ibrahim, M. E. Jenkins, M. D. Naish, and A. L. Trejos, “Real-time performance assessment of high-order tremor estimators used in a wearable tremor suppression device,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.30, pp. 2856-2865, 2022. https://doi.org/10.1109/TNSRE.2022.3211450
- [30] A. Ibrahim, Y. Zhou, M. E. Jenkins, A. L. Trejos, and M. D. Naish, “Real-time voluntary motion prediction and Parkinson’s tremor reduction using deep neural networks,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.29, pp. 1413-1423, 2021. https://doi.org/10.1109/TNSRE.2021.3097007
- [31] J. She, M. Fang, Y. Ohyama, H. Hashimoto, and M. Wu, “Improving disturbance-rejection performance based on an equivalent-input-disturbance approach,” IEEE Trans. on Industrial Electronics, Vol.55, No.1, pp. 380-389, 2008. https://doi.org/10.1109/TIE.2007.905976
- [32] M. Xie, J. She, Z. Liu, Z. Yang, and D. Sato, “A tremor-suppressing strategy based on the equivalent-input-disturbance approach,” IEEE/ASME Trans. on Mechatronics, Vol.29, No.5, pp. 3971-3980, 2024. https://doi.org/10.1109/TMECH.2024.3375911
- [33] Z. Lu, J. Zhang, L. Yao, J. Chen, and H. Luo, “The human–machine interaction methods and strategies for upper and lower extremity rehabilitation robots: A review,” IEEE Sensors J., Vol.24, No.9, pp. 13773-13787, 2024. https://doi.org/10.1109/JSEN.2024.3374344
- [34] K. Miyamoto, J. She, D. Sato, Y. Chen, and S. Nakano, “Wind-load estimation for seismically isolated building by equivalent-input-disturbance approach with robust-control strategy,” Control Engineering Practice, Vol.145, Article No.105853, 2024. https://doi.org/10.1016/j.conengprac.2024.105853
- [35] D. Zeng, Y. Liu, C. Qu, J. Cong, Y. Hou, and W. Lu, “Design and human-robot coupling performance analysis of flexible ankle rehabilitation robot,” IEEE Robotics and Automation Letters, Vol.9, No.1, pp. 579-586, 2024. https://doi.org/10.1109/LRA.2023.3330052
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.