Paper:
Development of Driving Robot Model for Vehicles with Adaptive Cruise Control System
Nobunori Okui
National Traffic Safety and Environment Laboratory
7-42-27 Jindaiji-higashimachi, Chofu, Tokyo 182-0012, Japan

As the development of automated driving technology progresses, vehicles equipped with such technology are widely observed in the market. However, the fuel efficiency and emission characteristics with automated driving functions are unknown. In fact, we do not find any technical papers that have made such an evaluation. Therefore, we developed an evaluation method to estimate fuel efficiency and emission characteristics by using the adaptive cruise control (ACC) system on the test course. In the approach adopted for this study, two vehicles were used as the test, and the preceding vehicle equipped with a driving robot was driven precisely to follow the speed pattern defined by the test cycle. The trailing vehicle was driven using the ACC function. Therefore, we developed the driver model of this robot to accurately track the target vehicle speed for the preceding vehicle in these tests. In particular, we added the operation logic of learning control and robot-less operation. In this result, for the preceding vehicle, we confirmed the correct operation of the pedals and ability to track the target vehicle speed. As a result, we could accurately evaluate the vehicle with ACC function and the usefulness of the method for this study was experimentally confirmed.
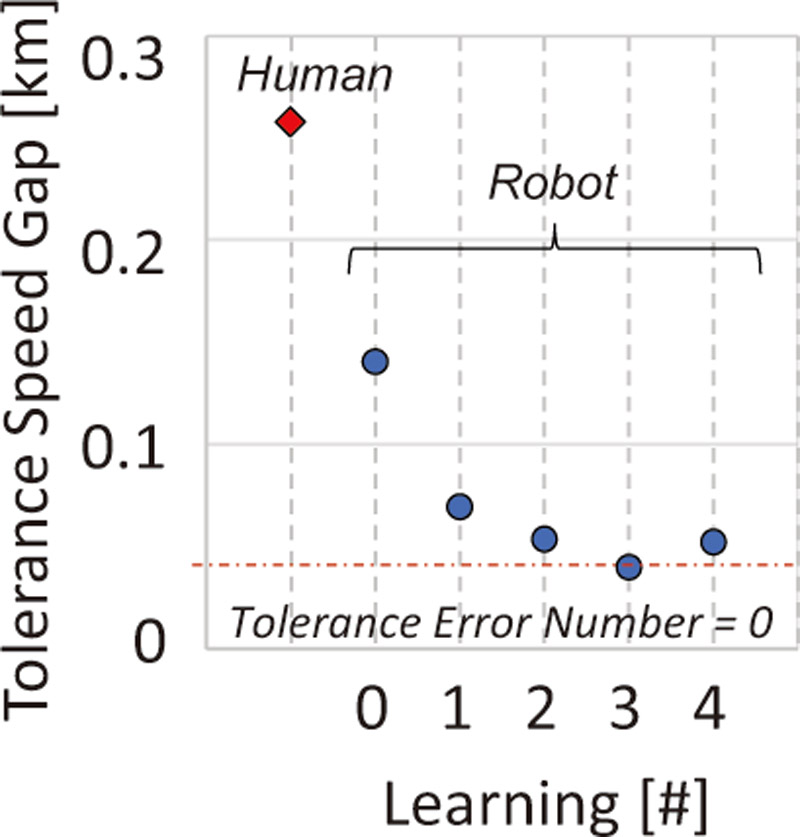
Effect of the driver model with learning function for EV
- [1] National Agency for Automobile and Land Transport Technology, “RDE certification test procedure of light-duty diesel vehicle,” TRIAS 31-J119-01, 2002.
- [2] N. Okui, “Development of driving robot and driver model applied regenerative brake control of electrified vehicles,” J. Robot. and Mechatron., Vol.36, No.4, pp. 879-888, 2024. https://doi.org/10.20965/jrm.2024.p0879
- [3] A. Salvi, J. Buzhardt, P. Tallapragda, V. N. Krovi, J. M. Smereka, and M. Brudnak, “Virtual evaluation of deep learning techniques for vision-based trajectory tracking,” SAE Int. J. Advances & Curr. Prac. in Mobility, Vol.5, No.1, pp. 326-334, 2023. https://doi.org/10.4271/2022-01-0369
- [4] S. Zagorski and G. Heydinger, “Development of an electronic stability control algorithm for all-terrain vehicles,” SAE Technical Paper, Article No.2023-01-0661, 2023. https://doi.org/10.4271/2023-01-0661
- [5] L. Shao and G. Chen, “Neural network adaptive robust output feedback control for driving robot,” SAE Technical Paper, Article No.2024-01-1965, 2024. https://doi.org/10.4271/2024-01-1965
- [6] D. Lee, J. Park, B. Choi, S. Choi, J. Kang, M. Chae, J. Kim, J. T. Lee, J. Han, Y. Lim, and S. Kwon, “Development of a driving pedal robot for indoor chassis dynamometer testing,” SAE Technical Paper, Article No.2024-01-2268, 2024. https://doi.org/10.4271/2024-01-2268
- [7] M. Koyama, H. Muranaka. M. Ishikawa, and Y. Takagi, “Bayesian optimization for digging control of wheel-loader using robot manipulator,” J. Robot. and Mechatron., Vol.36, No.2, pp. 273-283, 2024. https://doi.org/10.20965/jrm.2024.p0273
- [8] S. Wakitani, M. Sako. T. Yamamoto, Y. Ohno. H. Kishi, N. Yumoto, and K. Koiwai, “Design of a hierarchical-type control system based on smart MBD approach and its application to hydraulic excavator,” J. Robot. and Mechatron., Vol.36, No.4, pp. 909-917, 2024. https://doi.org/10.20965/jrm.2024.p0909
- [9] N. Okui, “Effects of the differences in driving behavior on fuel economy and emission characteristics during vehicle simulator execution,” SAE Technical Paper, Article No.2018-01-1768, 2018. https://doi.org/10.4271/2018-01-1768
- [10] SAE Int., “Surface vehicle recommended practice (drive quality evaluation for chassis dynamometer testing),” SAE J2951, 2011.
- [11] N. Okui, “Study on the test procedure of fuel economy and CO2 emissions for vehicles with adaptive cruise control system,” SAE Technical Paper, Article No.2024-01-4308, 2024. https://doi.org/10.4271/2024-01-4308
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.