Research Paper:
Experimental Validation of Optimal Message Limits in Distributed Local Search for Ship Collision Avoidance
Donggyun Kim

Mokpo National Maritime University
91 Haeyangdaehak-ro, Mokpo, Jeollanam 58628, Korea

This study introduces a method for determining the optimal number of information exchange messages in the distributed local search algorithm for ship collision avoidance. The cost of determining the movement of a ship is modeled as the sum of the collision risk between ships and the cost of reaching the destination. This total cost is then used to establish the maximum allowable cost, which defines the upper limit of the message exchanges. Experiments were conducted with varying numbers of ships, ranging from two to 20, to analyze the changes in the maximum cost and corresponding number of message exchanges. In all cases, the number of message exchanges was capped at five. Experimental validation using automatic identification system data demonstrated that an upper limit of 25 message exchanges was sufficient to ensure collision-free navigation for five ships, whereas an upper limit of 50 exchanges effectively handled scenarios involving 10 ships.
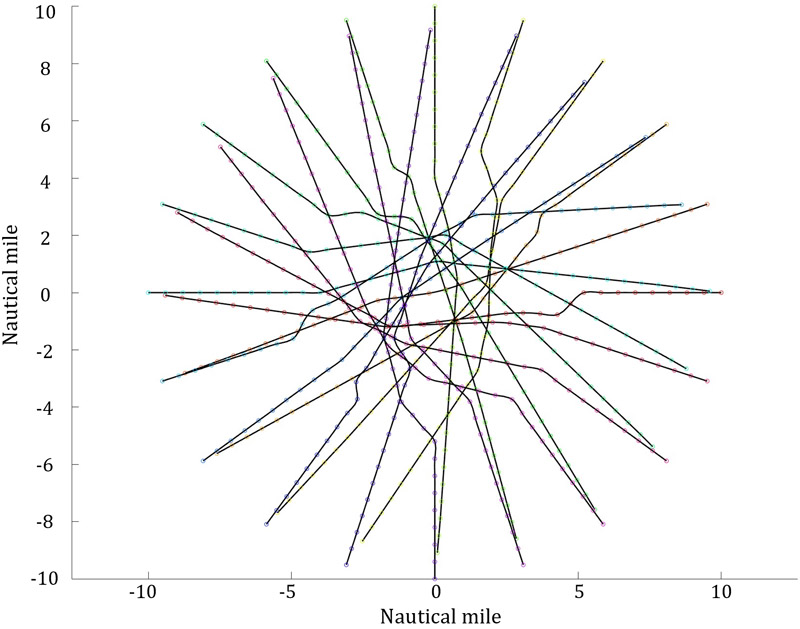
Simulated ship trajectories
- [1] “Review of maritime transport 2024.” https://unctad.org/publication/review-maritime-transport-2024 [Accessed December 9, 2024]
- [2] J. Li, Y. Xiong, and A. Yu, “Multi-UAV path planning for inspection of target points with stable monitoring frequencies,” J. Adv. Comput. Intell. Intell. Inform., Vol.28, No.5, pp. 1195-1203, 2024. https://doi.org/10.20965/jaciii.2024.p1195
- [3] S.-H. Li, F.-L. Yan, and Y.-Q. Li, “An improved multi target ship recognition model based on deep convolutional neural network,” J. Adv. Comput. Intell. Intell. Inform., Vol.28, No.1, pp. 216-223, 2024. https://doi.org/10.20965/jaciii.2024.p0216
- [4] D.-Y. Kim, J.-S. Jeong, G. Kim, H.-Y. Kim, and T. Hong, “Implementation of an intelligent system for identifying vessels exhibiting abnormal navigation patterns,” J. Adv. Comput. Intell. Intell. Inform., Vol.18, No.4, pp. 665-671, 2014. https://doi.org/10.20965/jaciii.2014.p0665
- [5] “Review of maritime transport 2022.” https://unctad.org/rmt2022 [Accessed December 9, 2024]
- [6] https://www.kmst.go.kr/web/verdictList.do?menuIdx=121 [Accessed December 9, 2024]
- [7] S. M. Kim, “Major legal issues on the sinking of hableány,” J. of Int. Business Trans. Law, No.26, pp. 97-117, 2019. https://doi.org/10.31839/ibt.2019.07.26.97
- [8] J. Akshay and S. Mutreja, “Autonomous Ship Market Research Report,” Allied Market Research, 2020.
- [9] D.-G. Kim, K. Hirayama, and G.-K. Park, “Collision avoidance in multiple-ship situations by distributed local search,” J. Adv. Comput. Intell. Intell. Inform., Vol.18, No.5, pp. 839-848, 2014. https://doi.org/10.20965/jaciii.2014.p0839
- [10] S. Li, J. Liu, and R. R. Negenborn, “Distributed coordination for collision avoidance of multiple ships considering ship maneuverability,” Ocean Engineering, Vol.181, pp. 212-226, 2019. https://doi.org/10.1016/j.oceaneng.2019.03.054
- [11] H. Yasukawa and Y. Yoshimura, “Introduction of MMG standard method for ship maneuvering predictions,” J. of Marine Science and Technology, Vol.20, No.1, pp. 37-52, 2015. https://doi.org/10.1007/s00773-014-0293-y
- [12] Y. He, Y. Jin, L. Huang, Y. Xiong, P. Chen, and J. Mou, “Quantitative analysis of COLREG rules and seamanship for autonomous collision avoidance at open sea,” Ocean Engineering, Vol.140, pp. 281-291, 2017. https://doi.org/10.1016/j.oceaneng.2017.05.029
- [13] Y. Xue, B. S. Lee, and D. Han, “Automatic collision avoidance of ships,” Proc. of the Institution of Mechanical Engineers, Part M: J. of Engineering for the Maritime Environment, Vol.223, Issue 1, pp. 33-46, 2009. https://doi.org/10.1243/14750902JEME123
- [14] F. P. Coenen, G. P. Smeaton, and A. G. Bole, “Knowledge-based collision avoidance,” J. of Navigation, Vol.42, Issue 1, pp. 107-116, 1989. https://doi.org/10.1017/S0373463300015125
- [15] Y. Ren, J. Mou, Q. Yan, and F. Zhang, “Study on Assessing Dynamic Risk of Ship Collision,” ICTIS 2011: Multimodal Approach to Sustained Transportation System Development: Information, Technology, Implementation, pp. 2751-2757, 2011. https://doi.org/10.1061/41177(415)346
- [16] S. Ni, N. Wang, Z. Qin, X. Yang, Z. Liu, and H. Li, “A distributed coordinated path planning algorithm for maritime autonomous surface ship,” Ocean Engineering, Vol.271, Article No.113759, 2023. https://doi.org/10.1016/j.oceaneng.2023.113759
- [17] J. Liu, J. Zhang, M. Zhang, X. Xin, and Z. Yang, “A novel collaborative collision avoidance decision-making methodology based on potential collision areas for intelligent navigation,” Ocean Engineering, Vol.318, Article No.120126, 2025. https://doi.org/10.1016/j.oceaneng.2024.120126
- [18] Y. Fujii and K. Tanaka, “Traffic capacity,” J. of Navigation, Vol.24, Issue 4, pp. 543-552, 1971. https://doi.org/10.1017/S0373463300022384
- [19] R. Szlapczynski and J. Szlapczynska, “Review of ship safety domains: Models and applications,” Ocean Engineering, Vol.145, pp. 277-289, 2017. https://doi.org/10.1016/j.oceaneng.2017.09.020
- [20] H. Lyu and Y. Yin, “Ship’s trajectory planning for collision avoidance at sea based on modified artificial potential field,” 2017 2nd Int. Conf. on Robotics and Automation Engineering (ICRAE), pp. 351-357, 2017. https://doi.org/10.1109/ICRAE.2017.8291409
- [21] H. Lyu and Y. Yin, “COLREGS-constrained real-time path planning for autonomous ships using modified artificial potential fields,” J. of Navigation, Vol.72, Issue 3, pp. 588-608, 2019. https://doi.org/10.1017/S0373463318000796
- [22] R. A. Soltan, H. Ashrafiuon, and K. R. Muske, “Trajectory real-time obstacle avoidance for underactuated unmanned surface vessels,” ASME 2009 Int. Design Engineering Technical Conf. and Computers and Information in Engineering Conf., Vol.7, pp. 1059-1067, 2009. https://doi.org/10.1115/DETC2009-86987
- [23] R. A. Soltan, H. Ashrafiuon, and K. R. Muske, “ODE-based obstacle avoidance and trajectory planning for unmanned surface vessels,” Robotica, Vol.29, Issue 5, pp. 691-703, 2011. https://doi.org/10.1017/S0263574710000585
- [24] F. Mahini, L. DiWilliams, K. Burke, and H. Ashrafiuon, “An experimental setup for autonomous operation of surface vessels in rough seas,” Robotica, Vol.31, Issue 5, pp. 703-715, 2013. https://doi.org/10.1017/S0263574712000720
- [25] L. Jiang, L. An, X. Zhang, C. Wang, and X. Wang, “A human-like collision avoidance method for autonomous ship with attention-based deep reinforcement learning,” Ocean Engineering, Vol.264, Article No.112378, 2022. https://doi.org/10.1016/j.oceaneng.2022.112378
- [26] D.-H. Chun, M.-I. Roh, H.-W. Lee, J. Ha, and D. Yu, “Deep reinforcement learning-based collision avoidance for an autonomous ship,” Ocean Engineering, Vol.234, Article No.109216, 2021. https://doi.org/10.1016/j.oceaneng.2021.109216
- [27] X. Xu, Y. Lu, G. Liu, P. Cai, and W. Zhang, “COLREGs-abiding hybrid collision avoidance algorithm based on deep reinforcement learning for USVs,” Ocean Engineering, Vol.247, Article No.110749, 2022. https://doi.org/10.1016/j.oceaneng.2022.110749
- [28] Y. Wang and Y. Zhao, “Multiple ships cooperative navigation and collision avoidance using multi-agent reinforcement learning with communication,” Ocean Engineering, Vol.320, Article No.120244, 2025. https://doi.org/10.1016/j.oceaneng.2024.120244
- [29] Y. Li, D. Wu, H. Wang, and J. Lou, “Dynamic collision avoidance for maritime autonomous surface ships based on deep Q-network with velocity obstacle method,” Ocean Engineering, Vol.320, Article No.120335, 2025. https://doi.org/10.1016/j.oceaneng.2025.120335
- [30] Y. Liu, C. Yang, and X. Du, “A multiagent-based simulation system for ship collision avoidance,” D.-S. Huang, L. Heutte, and M. Loog (Eds.), “Advanced Intelligent Computing Theories and Applications. With Aspects of Theoretical and Methodological Issues,” pp. 316-326, Springer, 2007. https://doi.org/10.1007/978-3-540-74171-8_31
- [31] S. Hornauer and A. Hahn, “Towards marine collision avoidance based on automatic route exchange,” IFAC Proc. Volumes, 9th IFAC Conf. on Control Applications in Marine Systems, Vol.46, Issue 33, pp. 103-107, 2013. https://doi.org/10.3182/20130918-4-JP-3022.00049
- [32] D. Kim, K. Hirayama, and T. Okimoto, “Distributed stochastic search algorithm for multi-ship encounter situations,” J. of Navigation, Vol.70, Issue 4, pp. 699-718, 2017. https://doi.org/10.1017/S037346331700008X
- [33] D.-G. Kim, K. Hirayama, and T. Okimoto, “Ship collision avoidance by distributed tabu search,” TransNav, the Int. J. on Marine Navigation and Safety of Sea Transportation, Vol.9, No.1, pp. 23-29, 2015. https://doi.org/10.12716/1001.09.01.03
- [34] J. Zhang, D. Zhang, X. Yan, S. Haugen, and C. G. Soares, “A distributed anti-collision decision support formulation in multi-ship encounter situations under COLREGs,” Ocean Engineering, Vol.105, pp. 336-348, 2015. https://doi.org/10.1016/j.oceaneng.2015.06.054
- [35] C. Denker and A. Hahn, “MTCAS – An Assistance System for Maritime Collision Avoidance,” 2th Int. Symp. on Integrated Ship’s Information Systems & Marine Traffic Engineering Conf., 2016.
- [36] L. Ferranti, R. R. Negenborn, T. Keviczky, and J. Alonso-Mora, “Coordination of multiple vessels via distributed nonlinear model predictive control,” 2018 European Control Conf. (ECC), pp. 2523-2528, 2018. https://doi.org/10.23919/ECC.2018.8550178
- [37] L. Chen, Y. Huang, H. Zheng, H. Hopman, and R. Negenborn, “Cooperative multi-vessel systems in urban waterway networks,” IEEE Trans. on Intelligent Transportation Systems, Vol.21, Issue 8, pp. 3294-3307, 2020. https://doi.org/10.1109/TITS.2019.2925536
- [38] T. Yang, C. Han, M. Qin, and C. Huang, “Learning-aided intelligent cooperative collision avoidance mechanism in dynamic vessel networks,” IEEE Trans. on Cognitive Communications and Networking, Vol.6, Issue 1, pp. 74-82, 2020. https://doi.org/10.1109/TCCN.2019.2945790
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.