Research Paper:
Effective Configuration of Reconfigurable Single Actuator Wave Mechanism Toward Autonomous Cable Laying
Yuki Sadasue†, Fuga Inagaki, and Masami Iwase
Tokyo Denki University
5 Senju Asahi-cho, Adachi, Tokyo 120-8551, Japan
†Corresponding author

This study aims to develop a cable laying robot capable of operating in both ceiling spaces and on cable racks. The robot needs to possess the ability to pull lead cables through these environments. To achieve this, a reconfigurable autonomous robot mechanism is proposed to move across cable racks and ceiling spaces using a traveling wave generated by a single motor. The performance and operation of the robot developed in this research are verified through experiments and comparison with previously developed robots. As a result, the advantages have been successfully demonstrated by reducing the number of motors, weight, and driving voltage by half while maintaining comparable environmental adaptability and propulsion speed.
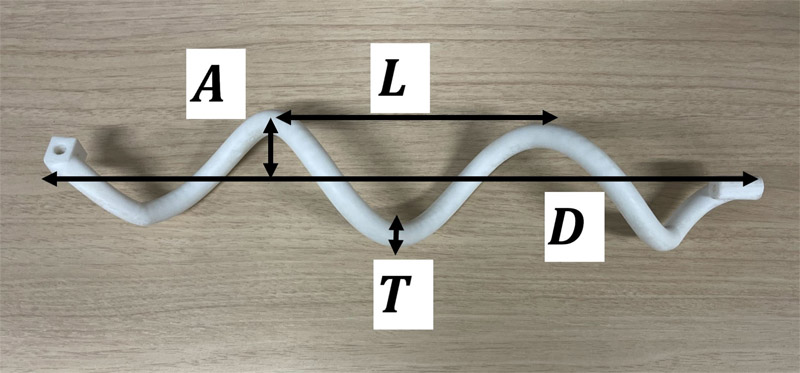
Proposed cord-like robot with four RSAW units
- [1] Ministry of Health, Labour and Welfare, “Key Points of the ‘Overtime Work Limit Regulations’ in the Construction Industry,” https://www.mhlw.go.jp/content/001232856.pdf [Accessed May 15, 2024]
- [2] Japan Federation of Construction Contractors, “Current state of the construction industry: Construction labor.” http://www.nikkenren.com/publication/handbook/chart6-4/index.html [Accessed May 15, 2024]
- [3] KANDENKO Corp., “Kandenko integrated report 2023.” https://www.kandenko.co.jp/english/pdf/KANDENKO-INTEGRATED-REPORT-2023en_webmxwg467nab5j5sm1ycpo.pdf [Accessed November 11, 2024]
- [4] S. Hirose, “Machine design of mobile snake-like robots,” J. of the Robotics Society of Japan, Vol.28, No.2, pp. 151-155, 2010 (in Japanese). https://doi.org/10.7210/jrsj.28.151
- [5] J. Liu, Y. Tong, and J. Liu, “Review of snake robots in constrained environments,” Robotics and Autonomous Systems, Vol.141, Article No.103785, 2021. https://doi.org/10.1016/j.robot.2021.103785
- [6] H. Suhara, T. Kamegawa, and A. Gofuku, “Realization of a snake robot that passes through inside of bent pipe connected with straigt pipes by helical rolling motion,” Proc. of the Robotics and Mechatronics Conf., Vol.2016, Article No.1A1-09b5, 2016 (in Japanese). https://doi.org/10.1299/jsmermd.2016.1A1-09b5
- [7] K. Ito, R. Murai, and K. Nakamichi, “Development of snake-like rescue robot designed for ease of use,” J. of the Robotics Society of Japan, Vol.27, No.4, pp. 419-426, 2009. https://doi.org/10.7210/jrsj.27.419
- [8] S. Han, S. Chon, J. Y. Kim, J. Seo, D. G. Shin, S. Park, J. T. Kim, J. Kim, M. Jin, and J. Cho, “Snake robot gripper module for search and rescue in narrow spaces,” IEEE Robotics and Automation Letters, Vol.7, No.2, pp. 1667-1673, 2022. https://doi.org/10.1109/LRA.2022.3140812
- [9] T. Maruyama, M. Iwase, and S. Hatakeyama, “A design and control of a snake-like robot using projection method,” Proc. of the SICE Annual Conf., Vol.47, pp. 213-213, 2004. https://doi.org/10.11511/jacc.47.0.213.0
- [10] F. Kasahara, T. Yanagida, K. Onodera, and M. Iwase, “Modeling and locomotion control using sdre of snake-like robot considering side-slip,” Trans. of the JSST, Vol.10, No.1, pp. 35-45, 2018.
- [11] H. Marvi, C. Gong, N. Gravish, H. Astley, M. Travers, R. L. Hatton, J. R. Mendelson, H. Choset, D. L. Hu, and D. I. Goldman, “Sidewinding with minimal slip: Snake and robot ascent of sandy slopes,” Science, Vol.346, No. 6206, pp. 224-229, 2014. https://doi.org/10.1126/science.1255718
- [12] T. Tate and H. Tsukagoshi, “Fluid powered soft cord robot aiming to move in the sand,” Proc. of the Robotics and Mechatronics Conf., Vol.2016, Article No.2A1-04b2, 2016 (in Japanese). https://doi.org/10.1299/jsmermd.2016.2A1-04b2
- [13] Z. Zuo, Z. Wang, B. Li, and S. Ma, “Serpentine locomotion of a snake-like robot in water environment,” 2008 IEEE Int. Conf. on Robotics and Biomimetics, pp. 25-30, 2009. https://doi.org/10.1109/ROBIO.2009.4912974
- [14] A. Crespi and A. J. Ijspeert, “Online optimization of swimming and crawling in an amphibious snake robot,” IEEE Trans. on Robotics, Vol.24, No.1, pp. 75-87, 2008. https://doi.org/10.1109/TRO.2008.915426
- [15] K. Ito, S. Kuroe, and T. Kobayashi, “Abstraction of state-action space utilizing properties of the body and the environmentl – Application to a 3-dimensional snake-like robot that operates on rubble,” 2012 6th IEEE Int. Conf. Intelligent Systems, pp. 114-120, 2012. https://doi.org/10.1109/IS.2012.6335200
- [16] K. Kouno, H. Yamada, and S. Hirose, “Development of active-joint active-wheel high traversability snake-like robot acm-r4.2,” J. Robot. Mechatron., Vol.25, No.3, pp. 559-566, 2013. https://doi.org/10.20965/jrm.2013.p0559
- [17] T. Takemori, M. Tanaka, and F. Matsuno, “Ladder climbing with a snake robot,” 2018 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2018. https://doi.org/10.1109/IROS.2018.8594411
- [18] M. Tanaka, M. Nakajima, Y. Suzuki, and K. Tanaka, “Development and control of articulated mobile robot for climbing steep stairs,” IEEE/ASME Trans. on Mechatronics, Vol.23, No.2, pp. 531-541, 2018. https://doi.org/10.1109/TMECH.2018.2792013
- [19] M. Tanaka, K. Kon, M. Nakajima, N. Matsumoto, S. Fukumura, H. Fukui, K. Sawabe, M. Fujita, and K. Tadakuma, “Development and field test of the articulated mobile robot t2 snake-4 for plant disaster prevention,” Advanced Robotics, Vol.34, No.2, pp. 70-88, 2020. https://doi.org/10.1080/01691864.2019.1680316
- [20] R. Watanabe and M. Tanaka, “Principle of object support by rope deformation and its application to rope climbing by snake robot,” Advanced Robotics, Vol.37, No.9, pp. 591-602, 2023. https://doi.org/10.1080/01691864.2023.2170189
- [21] T. Takayama, S. Hirose, and M. Arai, “Development of “souryu-iii”—Connected crawler vehicle for inspection of narrow and winding space—,” Proc. of the Robotics and Mechatronics Conf., Vol.2003, Article No.100, 2003 (in Japanese). https://doi.org/10.1299/jsmermd.2003.100_1
- [22] Q. Fu and C. Li, “Contact feedback helps snake robots propel against uneven terrain using vertical bending,” Bioinspiration and Biomimetics, Vol.18, No.5, Article No.056002, 2023. https://doi.org/10.1088/1748-3190/ace672
- [23] Y. Sadasue, H. Nagae, J. Takarabe, and M. Iwase, “Development of snake-like robot for cable-laying—Motion design for locomotion over cable racks and ceiling spaces,” J. Robot. Mechatron., Vol.36, No.6, pp. 1408-1418, 2024. https://doi.org/10.20965/jrm.2024.p1408
- [24] D. Shachaf, O. Inbar, and D. Zarrouk, “Rsaw, a highly reconfigurable wave robot: Analysis, design, and experiments,” IEEE Robotics and Automation Letters, Vol.4, No.4, pp. 4475-4482, 2019. https://doi.org/10.1109/LRA.2019.2932583
- [25] Ministry of Land, Infrastructure, Transport and Tourism, “Overview of ceiling collapse countermeasures in buildings,” 2013. https://www.mlit.go.jp/common/001009501.pdf [Accessed January 20, 2025]
- [26] D. Zarrouk, M. Mann, N. Degani, T. Yehuda, N. Jarbi, and A. Hess, “Single actuator wave-like robot (saw): Design, modeling, and experiments,” Bioinspiration & Biomimetics, Vol.11, No.4, Article No.046004, 2016. https://doi.org/10.1088/1748-3190/11/4/046004
- [27] R. Katz, D. Shachaf, and D. Zarrouk, “Energy-based design optimization of a miniature wave-like robot inside curved compliant tubes,” IEEE Robotics and Automation Letters, Vol.7, No.4, pp. 427-434, 2022. https://doi.org/10.1109/LRA.2022.3217688
- [28] D. Lee-Hee and D. Zarrouk, “Locomotion dynamics of a miniature wave-like robot, modeling and experiments,” 2019 Int. Conf. on Robotics and Automation (ICRA), Vol.2019-May, pp. 8422-8428, 2019. https://doi.org/10.1109/ICRA.2019.8794015
- [29] K. Yoshida and K. Nagaoka, “A mobile robot driven by uniaxial wave locomotion mechanism,” ROBOMECH J., Vol.10, No.1, Article No.21, 2023. https://doi.org/10.1186/s40648-023-00254-y
- [30] H. Sun, Q. Wu, X. Wang, T. Yang, and N. Sun, “A new self-reconfiguration wave-like crawling robot: Design, analysis, and experiments,” Machines, Vol.11, No.3, Article No.398, 2023. https://doi.org/10.3390/machines11030398
- [31] L.-H. Drory and D. Zarrouk, “Locomotion dynamics of a miniature wave-like robot, modeling and experiments,” 2019 Int. Conf. on Robotics and Automation (ICRA), pp. 8422-8428, 2019. https://doi.org/10.1109/ICRA.2019.8794015
- [32] L. R. Huang, A. Zhu, K. Wang, D. I. Goldman, A. Ruina, and K. H. Petersen, “Construction and excavation by collaborative double-tailed saw robots,” IEEE Robotics and Automation Letters, Vol.7, No.2, pp. 3742-3748, 2022. https://doi.org/10.1109/LRA.2022.3146562
- [33] R. Katz, D. Shachaf, and D. Zarrouk, “Energy-based design optimization of a miniature wave-like robot inside curved compliant tubes,” IEEE Robotics and Automation Letters, Vol.7, No.4, pp. 427-434, 2022. https://doi.org/10.1109/LRA.2022.3217688
- [34] D. Shachaf, R. Katz, and D. Zarrouk, “Wave-like robotic locomotion between highly flexible surfaces and comparison to worm robot locomotion,” Biomimetics, Vol.8, No.5, Article No.416, 2023. https://doi.org/10.3390/biomimetics8050416
- [35] Y. Zhang, Y. Zhang, Y. Wang, and Y. Shen, “A bioinspired soft robot with tunable stiffness for versatile locomotion,” Bioinspiration & Biomimetics, Vol.18, No.2, Article No.026001, 2023. https://doi.org/10.1088/1748-3190/acb1e8
- [36] Ministry of Agriculture, Forestry and Fisheries, “Technical guideline for planning and design of electrical facilities (high-low voltage edition),” (in Japanese). https://www.maff.go.jp/j/nousin//seko/kyotu_siyosyo/kikaisisin/attach/pdf/denkisetsubi_koutei-21.pdf [Accessed January 31, 2025]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.