Paper:
Landing Impact Simulation of a One-Legged Robot with a Series Elastic Actuator
Tomoharu Sekine*, Satoko Abiko**
 , and Teppei Tsujita***
, and Teppei Tsujita***
*Connected and Services Engineering Division, Nissan Motor Co., Ltd.
1-1 Morinosatoaoyama, Atsugi, Kanagawa 243-0123, Japan
**College of Engineering, Shibaura Institute of Technology
3-7-5 Toyosu, Koto-ku, Tokyo 135-8548, Japan
***Department of Mechanical Engineering, National Defense Academy of Japan
1-10-20 Hashirimizu, Yokosuka, Kanagawa 239-8686, Japan

Currently, natural disasters occur frequently. Therefore, disaster response robots are expected to reach disaster areas and operate at dangerous sites as quickly as possible. Humanoid robots are considered promising disaster response robots for performing various tasks instead of humans at disaster sites. To deploy robots at these sites, parachute descent is considered because the roads to reach the destination are generally destroyed. However, during parachute descent, the impact on the robot is quite significant compared to falling when standing or walking. To achieve parachute descent, it is necessary to generate an impact-absorbing landing motion. This paper develops a landing impact simulator to demonstrate the landing motion of a one-legged robot equipped with a series elastic actuator (SEA). The SEA features necessary characteristics to reduce impact while executing appropriate motion. First, the impact on a one-legged robot during landing was analyzed using a drop test. Second, based on the assumption of the linear spring-damper model of the SEA, the model parameters, such as the spring and damping coefficients, were identified through an optimization method using the results of the impact experiment. Subsequently, a landing impact simulation of the robot was performed to evaluate the validity of the developed SEA model. Compared with the drop test of a one-legged robot, it is confirmed that the developed SEA model has sufficient performance to reproduce the behavior of the flexible joint during landing.
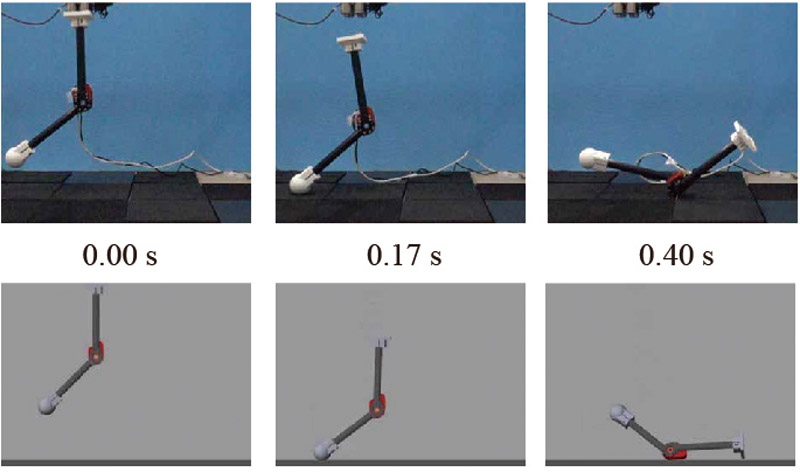
Comparison between experimental and simulation results for landing motion
- [1] Cabinet Office, “White Paper on Disaster Management in Japan,” 2021.
- [2] K. Nagatani et al., “Emergency Response to the Nuclear Accident at the Fukushima Daiichi Nuclear Power Plants using Mobile Rescue Robots,” J. of Field Robotics, Vol.30, No.1, pp. 44-63, 2013. https://doi.org/10.1002/rob.21439
- [3] E. Krotkov et al., “The DARPA Robotics Challenge Finals: Results and Perspectives,” J. of Field Robotics, Vol.34, No.2, pp. 229-240, 2017. https://doi.org/10.1002/rob.21683
- [4] C. Knabe et al., “Design of a series elastic humanoid for the DARPA Robotics Challenge,” Proc. of the 2015 IEEE Int. Conf. on Humanoid Robots, pp. 738-743, 2015. https://doi.org/10.1109/HUMANOIDS.2015.7363452
- [5] T. Tsujita et al., “Drop Test for Evaluating Effect of Cushioning Material and Servo Gain on Parachute Landing Impact Using a Small One-Legged Robot,” Proc. of the 2017 IEEE Int. Conf. on Robotics and Biomimetics, pp. 2474-2479, 2017. https://doi.org/10.1109/ROBIO.2017.8324791
- [6] Y. Hidaka et al., “Drop Impact Analysis and Shock Absorbing Motion of a Life-Sized One-Legged Robot with Soft Outer Shells and a Flexible Joint,” Proc. of IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics, pp. 928-933, 2020. https://doi.org/10.1109/AIM43001.2020.9158856
- [7] K. Fujiwara et al., “An Optimal Planning of Falling Motions of a Humanoid Robot,” Proc. of the 2007 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 456-462, 2007. https://doi.org/10.1109/IROS.2007.4399327
- [8] S. K. Yun et al., “Tripod Fall: Concept and Experiments of a Novel Approach to Humanoid Robot Fall Damage Reduction,” Proc. of the 2014 IEEE Int. Conf. Robotics and Automation, pp. 2799-2805, 2014. https://doi.org/10.1109/ICRA.2014.6907260
- [9] S. Ha et al., “Multiple Contact Planning for Minimizing Damage of Humanoid Falls,” Proc. of IEEE Int. Conf. on Intelligent Robots and Systems, pp. 2761-2767, 2015. https://doi.org/10.1109/IROS.2015.7353756
- [10] K.-N.-K. Nguyen et al., “Dynamic Fall Recovery Motion Generation on Biped Robot with Shell Protector,” Proc. of the 2021 IEEE Int. Robotics and Automation Letters, pp. 6741-6748, 2021. https://doi.org/10.1109/LRA.2021.3094234
- [11] M. Morisawa et al., “Reactive Stepping to Prevent Falling for Humanoids,” Proc. of the 9th IEEE-RAS Int. Conf. on Humanoid Robots, pp. 528-534, 2009. https://doi.org/10.1109/ICHR.2009.5379522
- [12] D. Liu et al., “A Rollover Strategy for Wrist Damage Reduction in a Forward Falling Humanoid,” Proc. of 2021 IEEE Int. Conf. on Mechatronics and Automation, pp. 293-300, 2021. https://doi.org/10.1109/ICMA52036.2021.9512722
- [13] D. H. Tran et al., “A Humanoid Robot Learns to Recover Perturbation During Swinging Motion,” IEEE Trans. on Systems, Man, and Cybernetics: Systems, Vol.50, No.10, pp. 3701-3712, 2018. https://doi.org/10.1109/TSMC.2018.2884619
- [14] X. Wan et al., “Landing Motion of a Legged Robot with Minimization of Impact Force and Joint Torque,” J. Robot. Mechatron., Vol.27, No.1, pp. 32-40, 2015. https://doi.org/10.20965/jrm.2015.p0032
- [15] T. Tsujita et al., “Analysis of Drop Test Using a One-Legged Robot Toward Parachute Landing by a Humanoid Robot,” Proc. of the 2017 IEEE Int. Conf. on Robotics and Biomimetics, pp. 221-226, 2017. https://doi.org/10.1109/ROBIO.2017.8324421
- [16] G. A. Pratt et al., “Series Elastic Actuators,” Proc. of the 1995 IEEE Int. Conf. on Intelligent Robots and Systems, pp. 399-406, 1995. https://doi.org/10.1109/IROS.1995.525827
- [17] F. Sergi et al., “Design and characterization of a compact rotary series elastic actuator for knee assistance during overground walking,” Proc. of the 2012 IEEE Int. Conf. on Biomedical Robotics and Biomechatronics, pp. 1931-1936, 2012. https://doi.org/10.1109/BioRob.2012.6290271
- [18] E. J. Rouse et al., “Clutchable series-elastic actuator: Design of a robotic knee prosthesis for minimum energy consumption,” Proc. of the 2013 IEEE Int. Conf. on Rehabilitation Robotics, 2013. https://doi.org/10.1109/ICORR.2013.6650383
- [19] S. J. Jorgensen et al., “Deploying the NASA Valkyrie Humanoid for IED Response: An Initial Approach and Evaluation Summary,” Proc. of the 2019 IEEE Int. Conf. on Humanoid Robots, 2019. https://doi.org/10.1109/Humanoids43949.2019.9034993
- [20] N. G. Tsagarakis et al., “COMpliant huMANoid COMAN: Optimal joint stiffness tuning for modal frequency control,” Proc. of the 2013 IEEE Int. Conf. on Robotics and Automation, pp. 673-678, 2013. https://doi.org/10.1109/ICRA.2013.6630645
- [21] K. Yoshida, “The SpaceDyn: a MATLAB Toolbox for Space and Mobile Robots,” J. Robot. Mechatron., Vol.12, No.4, pp. 411-416, 2000. https://doi.org/10.20965/jrm.2000.p0411
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.