Research Paper:
Assist Control of Lifting Motion of Lumbar-Powered Exoskeleton Using IMU Sensors
Ryosuke Fujii*, Yasutake Takahashi*
 , Satoki Tsuichihara*
, and Takayoshi Yamada**
, Satoki Tsuichihara*
, and Takayoshi Yamada**
*Graduate School of Engineering, University of Fukui
3-9-1 Bunkyo, Fukui, Fukui 910-8507, Japan
**Faculty of Education, University of Fukui
3-9-1 Bunkyo, Fukui, Fukui 910-8507, Japan

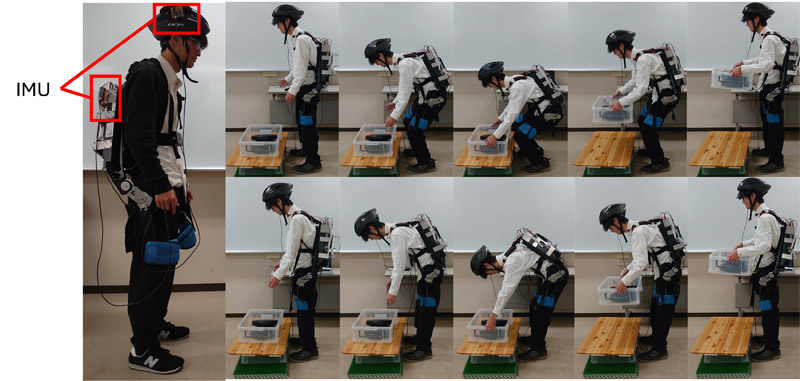
According to Japan’s Ministry of Health, Labour and Welfare, work-related lower back pain is prevalent in industries such as commerce, finance, health, and hygiene. Such pain is primarily caused by performing tasks involving heavy lifting and carrying in various fields, including caregiving, transportation, and agriculture. This study proposes a lumbar-powered exoskeleton to assist lifting movements. Passive exoskeletons use springs or rubber belts for assistive force, thus rendering them lightweight but unable to provide controlled assistance based on the wearer’s movements. Active exoskeletons, such as the Hybrid Assistive Limb robot suit, use surface electromyography (sEMG) to detect movement characteristics. However, sEMG is susceptible to noise owing to factors such as sweating and skin contamination. This study proposes a lumbar exoskeleton control method using a nine-axis inertial measurement unit (IMU) that is easy to attach and less affected by the wearer’s state. Convolutional neural networks and long short-term memory models are adopted for posture classification. Tests involving 10 subjects show that integrated electromyographic activity decreased significantly.
IMU-driven exoskeleton aids lifting motion
- [1] Ministry of Health, Labour and Welfare, “Results of surveys on the occurrence of work-related illnesses, etc.,” 2024. https://www.mhlw.go.jp/content/11300000/001147098.pdf [Accessed February 13, 2024]
- [2] I. Kingma et al., “Lumbar loading during lifting: A comparative study of three measurement techniques,” J. of Electromyography and Kinesiology, Vol.11, No.5, pp. 337-345, 2001. https://doi.org/10.1016/S1050-6411(01)00011-6
- [3] T. Schmalz et al., “A passive back-support exoskeleton for manual materials handling: Reduction of low back loading and metabolic effort during repetitive lifting,” IISE Trans. on Occupational Ergonomics and Human Factors, Vol.10, No.1, pp. 7-20, 2022. https://doi.org/10.1080/24725838.2021.2005720
- [4] F. Durante, M. G. Antonelli, and P. B. Zobel, “Development of an active exoskeleton for assisting back movements in lifting weights,” Int. J. of Mechanical Engineering and Robotics Research, Vol.7, No.4, pp. 353-360, 2018. https://doi.org/10.18178/ijmerr.7.4.353-360
- [5] J. Park, H. Park, and J. Kim, “Performance estimation of the lower limb exoskeleton for plantarflexion using surface electromyography (sEMG) signals,” J. of Biomechanical Science and Engineering, Vol.12, No.2, Article No.16-00595, 2017. https://doi.org/10.1299/jbse.16-00595
- [6] A. T. Asbeck, S. M. M. De Rossi, K. G. Holt, and C. J. Walsh, “A biologically inspired soft exosuit for walking assistance,” The Int. J. of Robotics Research, Vol.34, No.6, pp. 744-762, 2015. https://doi.org/10.1177/0278364914562476
- [7] H. Kawamoto and Y. Sankai, “Power assist method based on Phase Sequence and muscle force condition for HAL,” Advanced Robotics, Vol.19, No.7, pp. 717-734, 2005. https://doi.org/10.1163/1568553054455103
- [8] C. Fleischer, A. Wege, K. Kondak, and G. Hommel, “Application of EMG signals for controlling exoskeleton robots,” Biomedical Engineering, Vol.51, Nos.5-6, pp. 314-319, 2006. https://doi.org/10.1515/BMT.2006.063
- [9] J. R. Koller, D. A. Jacobs, D. P. Ferris, and C. D. Remy, “Learning to walk with an adaptive gain proportional myoelectric controller for a robotic ankle exoskeleton,” J. of NeuroEngineering and Rehabilitation, Vol.12, Article No.97, 2015. https://doi.org/10.1186/s12984-015-0086-5
- [10] S. D. Hlucny and D. Novak, “Characterizing human box-lifting behavior using wearable inertial motion sensors,” Sensors, Vol.20, No.8, Article No.2323, 2020. https://doi.org/10.3390/s20082323
- [11] M. Lazzaroni et al., “Acceleration-based assistive strategy to control a back-support exoskeleton for load handling: Preliminary evaluation,” IEEE 16th Int. Conf. on Rehabilitation Robotics, pp. 625-630, 2019. https://doi.org/10.1109/ICORR.2019.8779392
- [12] B. Chen, F. Lanotte, L. Grazi, N. Vitiello, and S. Crea, “Classification of lifting techniques for application of a robotic hip exoskeleton,” Sensors, Vol.19, No.4, Article No.963, 2019. https://doi.org/10.3390/s19040963
- [13] S. Nomura et al., “Power assist control based on human motion estimation using motion sensors for powered exoskeleton without binding legs,” Applied Sciences, Vol.9, No.1, Article No.164, 2019. https://doi.org/10.3390/app9010164
- [14] Z. Guo, C. Wang, and C. Song, “A real-time stable-control gait switching strategy for lower-limb rehabilitation exoskeleton,” PLOS ONE, Vol.15, No.8, Article No.e0238247, 2020. https://doi.org/10.1371/journal.pone.0238247
- [15] Z. Yin et al., “SA-SVM-based locomotion pattern recognition for exoskeleton robot,” Applied Sciences, Vol.11, No.12, Article No.5573, 2021. https://doi.org/10.3390/app11125573
- [16] Y. Long et al., “PSO-SVM-based online locomotion mode identification for rehabilitation robotic exoskeletons,” Sensors, Vol.16, No.9, Article No.1408, 2016. https://doi.org/10.3390/s16091408
- [17] C. Chen, X. Wu, D. Liu, W. Feng, and C. Wang, “Design and voluntary motion intention estimation of a novel wearable full-body flexible exoskeleton robot,” Mobile Information Systems, Vol.2017, Article No.8682168, 2017. https://doi.org/10.1155/2017/8682168
- [18] X. Zhang, S. Sun, C. Li, and Z. Tang, “Impact of load variation on the accuracy of gait recognition from surface EMG signals,” Applied Sciences, Vol.8, No.9, Article No.1462, 2018. https://doi.org/10.3390/app8091462
- [19] Y. Yuan et al., “Gait phase classification based on sEMG signals using long short-term memory for lower limb exoskeleton robot,” IOP Conf. Series: Materials Science and Engineering, Vol.853, Article No.012041, 2020. https://doi.org/10.1088/1757-899X/853/1/012041
- [20] C. Wang, X. Wu, Y. Ma, G. Wu, and Y. Luo, “A flexible lower extremity exoskeleton robot with deep locomotion mode identification,” Complexity, Vol.2018, Article No.5712108, 2018. https://doi.org/10.1155/2018/5712108
- [21] M. Ding, M. Nagashima, S.-G. Cho, J. Takamatsu, and T. Ogasawara, “Control of walking assist exoskeleton with time-delay based on the prediction of plantar force,” IEEE Access, Vol.8, pp. 138642-138651, 2020. https://doi.org/10.1109/ACCESS.2020.3010644
- [22] Y. Xia, J. Li, D. Yang, and W. Wei, “Gait phase classification of lower limb exoskeleton based on a compound network model,” Symmetry, Vol.15, No.1, Article No.163, 2023. https://doi.org/10.3390/sym15010163
- [23] A. Xu et al., “Evaluation of CNN algorithm at locomotion mode identification for a knee-assisted exoskeleton,” Advanced Robotics, Vol.37, No.11, pp. 691-701, 2023. https://doi.org/10.1080/01691864.2023.2197966
- [24] L. Zhu et al., “A novel motion intention recognition approach for soft exoskeleton via IMU,” Electronics, Vol.9, No.12, Article No.2176, 2020. https://doi.org/10.3390/electronics9122176
- [25] W. Wei, S. Zha, Y. Xia, J. Gu, and X. Lin, “A hip active assisted exoskeleton that assists the semi-squat lifting,” Applied Sciences, Vol.10, No.7, Article No.2424, 2020. https://doi.org/10.3390/app10072424
- [26] H. J. Hislop and J. Montgomery, “Daniels and Worthingham’s Muscle Testing: Techniques of Manual Examination,” 6th Edition, W. B. Saunders Company, 1995.
- [27] J. Brooke, “SUS: A ‘quick and dirty’ usability,” P. W. Jordan, B. Thomas, I. L. McClelland, and B. Weerdmeester (Eds.), “Usability Evaluation in Industry,” pp. 189-194, Taylor & Francis, 1996.
- [28] I. Lezhenin, N. Bogach, and E. Pyshkin, “Urban sound classification using long short-term memory neural network,” Proc. of the 2019 Federated Conf. on Computer Science and Information Systems, pp. 57-60, 2019. https://doi.org/10.15439/2019F185
- [29] A. Farzad, H. Mashayekhi, and H. Hassanpour, “A comparative performance analysis of different activation functions in LSTM networks for classification,” Neural Computing and Applications, Vol.31, No.7, pp. 2507-2521, 2019. https://doi.org/10.1007/s00521-017-3210-6
- [30] A. Vaswani et al., “Attention is all you need,” Version 7, arXiv:1706.03762, 2023. https://doi.org/10.48550/arXiv.1706.03762
- [31] M. Beck et al., “xLSTM: Extended long short-term memory,” arXiv:2405.04517, 2024. https://doi.org/10.48550/arXiv.2405.04517
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.