Paper:
Teaching and Reproduction for In-Hand Object Manipulation
Masahito Yashima
 , Tasuku Yamawaki
, and Isamu Kurimoto
, Tasuku Yamawaki
, and Isamu Kurimoto
National Defense Academy of Japan
1-10-20 Hashirimizu, Yokosuka, Kanagawa 239-8686, Japan

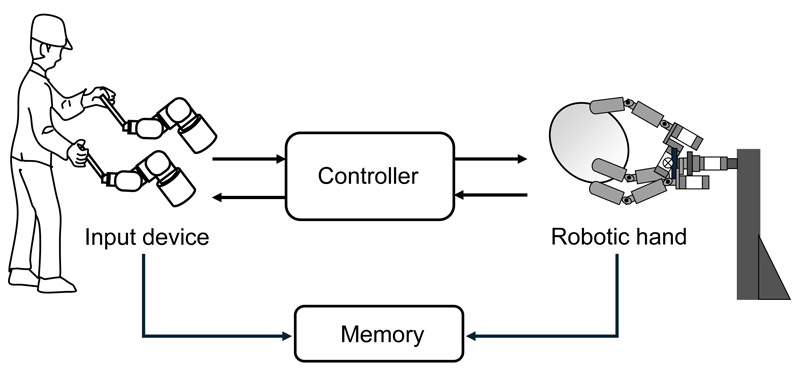
The industrial sector has demonstrated increased interest in implementing in-hand manipulation as an alternative to conventional parallel gripper hands, enabling dexterous object handling with substantial pose changes. In-hand manipulation involves challenges such as complex contact transitions with robot fingers and difficult-to-model factors such as friction and surface irregularities, which complicate real-world applications despite successful simulations. This study proposes a novel approach for in-hand manipulation that outperforms traditional model-based motion-generation methods. A motion teaching system utilizing a leader–follower system was developed to address the limitations of conventional methods. This technique leverages human skills for robot motion teaching without requiring motion programming or precise modeling. The control system ensures stability during motion teaching, adapts to objects and operators with unknown dynamics, and can easily be extended to a motion-reproduction system. For motion-trajectory generation, we introduced a method that identifies highly reproducible motion trajectories by analyzing the similarity of time-series data from multiple teaching datasets. By selecting from the teaching data, we determine a motion trajectory that maintains a force consistent with the motion over time. Experiments validated the efficacy of the proposed system.
Teaching for in-hand object manipulation
- [1] R. R. Ma and A. M. Dollar, “On dexterity and dexterous manipulation,” 2011 15th Int. Conf. on Advanced Robotics (ICAR), 2011. https://doi.org/10.1109/ICAR.2011.6088576
- [2] T. Yamawaki and M. Yashima, “Randomized planning and control strategy for whole-arm manipulation of a slippery polygonal object,” 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 2485-2492, 2013. https://doi.org/10.1109/IROS.2013.6696706
- [3] M. Yashima and T. Yamawaki, “Iterative learning scheme for dexterous in-hand manipulation with stochastic uncertainty,” 2018 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3166-3171, 2018. https://doi.org/10.1109/ICRA.2018.8462913
- [4] W. Zhou, S. Guo, J. Guo, F. Meng, Z. Chen, and C. Lyu, “A surgeon’s habits-based novel master manipulator for the vascular interventional surgical master-slave robotic system,” IEEE Sensors J., Vol.22, Issue 10, pp. 9922-9931, 2022. https://doi.org/10.1109/JSEN.2022.3166674
- [5] A. Milstein, T. Ganel, S. Berman, and I. Nisky, “Human-centered transparency of grasping via a robot-assisted minimally invasive surgery system,” IEEE Trans. on Human-Machine Systems, Vol.48, Issue 4, pp. 349-358, 2018. https://doi.org/10.1109/THMS.2018.2846033
- [6] N. Enayati, E. De Momi, and G. Ferrigno, “Haptics in robot-assisted surgery: Challenges and benefits,” IEEE Reviews in Biomedical Engineering, Vol.9, pp. 49-65, 2016. https://doi.org/10.1109/RBME.2016.2538080
- [7] K. Nagatani, S. Kiribayashi, Y. Okada, K. Otake, K. Yoshida, S. Tadokoro, T. Nishimura, T. Yoshida, E. Koyanagi, M. Fukushima, and S. Kawatsuma, “Emergency Response to the Nuclear Accident at the Fukushima Daiichi Nuclear Power Plants Using Mobile Rescue Robots,” J. of Field Robotics, Vol.30, No.1, pp. 44-63, 2013. https://doi.org/10.1002/rob.21439
- [8] J. Artigas, R. Balachandran, C. Riecke, M. Stelzer, B. Weber, J.-H. Ryu, and A. Albu-Schaeffer, “KONTUR-2: Force-feedback teleoperation from the international space station,” 2016 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 1166-1173, 2016. https://doi.org/10.1109/ICRA.2016.7487246
- [9] P. Schmaus, D. Leidner, T. Krüger, R. Bayer, B. Pleintinger, A. Schiele, and N. Y. Lii, “Knowledge driven orbit-to-ground teleoperation of a robot coworker,” IEEE Robotics and Automation Letters, Vol.5, Issue 1, pp. 143-150, 2020. https://doi.org/10.1109/LRA.2019.2948128
- [10] R. Saltaren, A. R. Barroso, and O. Yakrangi, “Robotics for seabed teleoperation: Part-1—Conception and practical implementation of a hybrid seabed robot,” IEEE Access, Vol.6, pp. 60559-60569, 2018. https://doi.org/10.1109/ACCESS.2018.2876040
- [11] D. Lawrence, “Stability and transparency in bilateral teleoperation,” IEEE Trans. on Robotics and Automation, Vol.9, Issue 5, pp. 624-637, 1993. https://doi.org/10.1109/70.258054
- [12] Y. Michel, R. Rahal, C. Pacchierotti, P. R. Giordano, and D. Lee, “Bilateral teleoperation with adaptive impedance control for contact tasks,” IEEE Robotics and Automation Letters, Vol.6, Issue 3, pp. 5429-5436, 2021. https://doi.org/10.1109/LRA.2021.3066974
- [13] L. Love and W. Book, “Force reflecting teleoperation with adaptive impedance control,” IEEE Trans. on Systems, Man, and Cybernetics, Part B (Cybernetics), Vol.34, Issue 1, pp. 159-165, 2004. https://doi.org/10.1109/TSMCB.2003.811756
- [14] N. Chopra, M. Fujita, R. Ortega, and M. W. Spong, “Passivity-based control of robots: Theory and examples from the literature,” IEEE Control Systems Magazine, Vol.42, Issue 2, pp. 63-73, 2022. https://doi.org/10.1109/MCS.2021.3139722
- [15] L. Rozo, S. Calinon, D. G. Caldwell, P. Jiménez, and C. Torras, “Learning physical collaborative robot behaviors from human demonstrations,” IEEE Trans. on Robotics, Vol.32, Issue 3, pp. 513-527, 2016. https://doi.org/10.1109/TRO.2016.2540623
- [16] S. M. Khansari-Zadeh and A. Billard, “Learning stable nonlinear dynamical systems with Gaussian mixture models,” IEEE Trans. on Robotics, Vol.27, Issue 5, pp. 943-957, 2011. https://doi.org/10.1109/TRO.2011.2159412
- [17] A. Gams, B. Nemec, A. J. Ijspeert, and A. Ude, “Coupling movement primitives: Interaction with the environment and bimanual tasks,” IEEE Trans. on Robotics, Vol.30, Issue 4, pp. 816-830, 2014. https://doi.org/10.1109/TRO.2014.2304775
- [18] P. Kormushev, S. Calion, and D. G. Caldwell, “Imitation learning of positional and force skills demonstrated via kinesthetic teaching and haptic input,” Advanced Robotics, Vol.25, Issue 5, pp. 581-603, 2011. https://doi.org/10.1163/016918611X558261
- [19] C. Campbell, R. Peters, R. Bodenheimer, W. Bluethmann, E. Huber, and R. Ambrose, “Superpositioning of behaviors learned through teleoperation,” IEEE Trans. on Robotics, Vol.22, Issue 1, pp. 79-91, 2006. https://doi.org/10.1109/TRO.2005.861485
- [20] M. Onishi, T. Odashima, and Z. Luo, “Cognitive integrated motion generation for environmental adaptive robots,” Electrical Engineering in Japan, Vol.156, Issue 3, pp. 62-70, 2006. https://doi.org/10.1002/eej.20349
- [21] K. Kosuge, T. Itoh, T. Fukuda, and M. Otsuka, “Scaled telemanipulation system using semi-autonomous task-oriented virtual tool,” Proc. of 1995 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Vol.2, pp. 124-129, 1995. https://doi.org/10.1109/IROS.1995.526149
- [22] H. Su, S. Liu, B. Zheng, X. Zhou, and K. Zheng, “A survey of trajectory distance measures and performance evaluation,” The VLDB J., Vol.29, No.1, pp. 3-32, 2020. https://doi.org/10.1007/s00778-019-00574-9
- [23] H. Sakoe and S. Chiba, “Dynamic programming algorithm optimization for spoken word recognition,” IEEE Trans. on Acoustics, Speech, and Signal Processing, Vol.26, Issue 1, pp. 43-49, 1978. https://doi.org/10.1109/TASSP.1978.1163055
- [24] L. D. Tran, T. Yamawaki, H. Fujiwara, and M. Yashima, “Admittance learning strategy using generalized simplex gradient methods for human–robot collaboration,” Mechanical Engineering J., Vol.10, No.4, Article No.23-00129, 2023. http://dx.doi.org/10.1299/mej.23-00129
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.