Paper:
Learning Effect on the Elderly of Robots Teaching Driving Behavior Based on the GROW Model
Felix Jimenez*1
 , Syo Sugita*2, Masayoshi Kanoh*3
, Tomohiro Yoshikawa*4
, and Mitsuhiro Hayase*5
, Syo Sugita*2, Masayoshi Kanoh*3
, Tomohiro Yoshikawa*4
, and Mitsuhiro Hayase*5
*1School of Information Science and Technology, Aichi Prefectural University
1522-3 Ibaragabasama, Nagakute, Aichi 480-1198, Japan
*2AKKODiS Consulting Ltd.
3-4-1 Shibaura, Minato-ku, Tokyo 108-0023, Japan
*3School of Engineering, Chukyo University
101-2 Yagoto Honmachi, Showa-ku, Nagoya, Aichi 466-8666, Japan
*4Department of Health Data Science, Suzuka University of Medical Science
1001-1 Kishioka, Suzuka, Mie 510-0293, Japan
*5School of Information and Social Design, Sugiyama Jogakuen University
17-3 Hosigaoka-motomatchi, Chikusa-ku, Nagoya, Aichi 464-8662, Japan

In recent years, educational support robots that assist learning have attracted attention. This study focuses on robots that teach driving techniques. In driving schools, instructors teach drivers using a method that gradually teaches them about situations and actions. This teaching method is known as the GROW model. Previous studies have shown that collaborative learning with robots using the GROW model is an effective way of teaching driving behavior to university students. However, in today’s society, the number of accidents caused by elderly drivers is increasing, and the demand for teaching driving behaviors to the elderly is high. Therefore, it is important to verify the effectiveness of this approach for elderly drivers. This study investigated the effects of collaborative learning with a robot using the GROW model on elderly people. A comparative experiment was conducted using three groups: a robot with the GROW model, a conventional robot without the GROW model, and a learning system. The experimental results showed that compared to the conventional robot and learning system, the robot equipped with the GROW model was more memorable for the elderly.
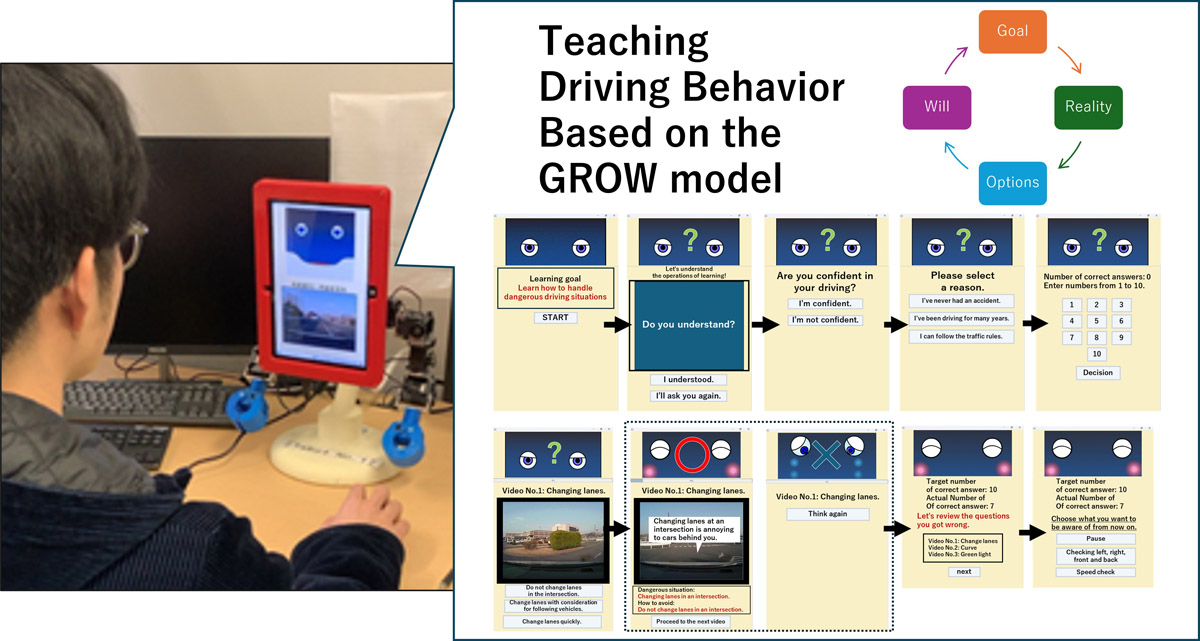
Overview of the proposed robot
- [1] R. Yoshizawa, F. Jimenez, and K. Murakami, “Proposal of a behavioral model for robots supporting learning according to learners’ learning performance,” J. Robot. Mechatron., Vol.32, No.4, pp. 769-779, 2020. https://doi.org/10.20965/jrm.2020.p0769
- [2] K. Okawa, F. Jimenez, S. Akizuki, and T. Yoshikawa, “Proposal of learning support model for teacher-type robot supporting learning according to learner’s perplexed facial expressions,” J. Robot. Mechatron., Vol.36, No.1, pp. 168-180, 2024. https://doi.org/10.20965/jrm.2024.p0168
- [3] H. Kaede, F. Jimenez, and T. Miyamoto, “Impact of negotiating the number of solved problems by a robot on junior high school students in collaborative learning,” J. Robot. Mechatron., Vol.37, No.3, pp. 637-647, 2025. https://doi.org/10.20965/jrm.2025.p0637
- [4] J.-H. Han, M.-H. Jo, V. Jones, and J.-H. Jo, “Comparative study on the educational use of home robots for children,” J. of Information Processing Systems, Vol.4, No.4, pp. 159-168, 2008. https://doi.org/10.3745/JIPS.2008.4.4.159
- [5] K. Shinozawa, F. Naya, J. Yamato, and K. Kogure, “Differences in effect of robot and screen agent recommendations on human decision-making,” Int. J. of Human-Computer Studies, Vol.62, No.2, pp. 267-279, 2005. https://doi.org/10.1016/j.ijhcs.2004.11.003
- [6] W. A. Bainbridge, J. Hart, E. S. Kim, and B. Scassellati, “The effect of presence on human-robot interaction,” The 17th IEEE Int. Symp. on Robot and Human Interactive Communication, pp. 701-706, 2008. https://doi.org/10.1109/ROMAN.2008.4600749
- [7] M. Fridin and M. Belokopytov, “Embodied robot versus virtual agent: Involvement of preschool children in motor task performance,” Int. J. of Human-Computer Interaction, Vol.30, No.6, pp. 459-469, 2014. https://doi.org/10.1080/10447318.2014.888500
- [8] F. Jimenez, T. Yoshikawa, T. Furuhashi, and M. Kanoh, “Effects of a novel sympathy-expression method on collaborative learning among junior high school students and robots,” J. Robot. Mechatron., Vol.30, No.2, pp. 282-291, 2018. https://doi.org/10.20965/jrm.2018.p0282
- [9] T. Belpaeme, J. Kennedy, A. Ramachandran, B. Scassellati, and F. Tanaka, “Social robots for education: A review,” Science Robotics, Vol.3. No.21, Article No.eaat5954, 2018. https://doi.org/10.1126/scirobotics.aat5954
- [10] K. Suzuki and M. Kanoh, “Investigating effectiveness of an expression education support robot that nods and gives hints,” J. Adv. Comput. Intell. Intell. Inform., Vol.21, No.3, pp. 483-495, 2017. https://doi.org/10.20965/jaciii.2017.p0483
- [11] T. Tanaka et al., “Driver agent for encouraging safe driving behavior for the elderly,” Proc. of the 5th Int. Conf. on Human Agent Interaction, pp. 71-79, 2017. https://doi.org/10.1145/3125739.3125743
- [12] T. Tanaka et al., “Preliminary study for feasibility of driver agent in actual car environment—Driver agent for encouraging safe driving behavior (3),” J. of Transportation Technologies, Vol.10, No.2, pp. 128-143, 2020. https://doi.org/10.4236/jtts.2020.102008
- [13] K. Tanaka et al., “The effect of adding Japanese honorifics when naming a driving-review robot,” J. Robot. Mechatron., Vol.36, No.6, pp. 1577-1591, 2024. https://doi.org/10.20965/jrm.2024.p1577
- [14] F. Jimenez et al., “Effects of robots teaching driving behavior using dangerous driving videos,” J. of Japan Society for Fuzzy Theory and Intelligent Informatics, Vol.33, No.4, pp. 819-826, 2021 (in Japanese). https://doi.org/10.3156/jsoft.33.4_819
- [15] I. Edwards, “Can Drivers Really Teach Themselves?: A Practitioner’s Guide to Using Learner Centred and Coaching Approaches in Driver Education,” eDriving Solutions Ltd., 2011.
- [16] J. Whitmore, “Coaching for Performance: Growing Human Potential and Purpose (4th ed.),” Nicholas Brealey Publishing, 2009.
- [17] S. Panchal and P. Riddell, “The GROWS model: Extending the GROW coaching model to support behavioural change,” The Coaching Psychologist, Vol.16, No.2, pp. 12-25, 2020. https://doi.org/10.53841/bpstcp.2020.16.2.12
- [18] S. Sugita, F. Jimenez, M. Kanoh, M. Hayase, and T. Yoshikawa, “The effect of a robot that employs a step-by-step coaching approach to teach driving behavior on university students,” Proc. of the 40th Fuzzy System Symp., Article No.1A1-3, 2024 (in Japanese). https://doi.org/10.14864/fss.40.0_6
- [19] Y. Tanizaki, F. Jimenez, T. Yoshikawa, T. Furuhashi, and M. Kanoh, “Effects of educational support robots using sympathy expression method with body movement and facial expression on the learners in short and long-term experiments,” Advances in Science, Technology and Engineering Systems J., Vol.4. No.2, pp. 183-189, 2019. https://doi.org/10.25046/aj040224
- [20] M. Shiomi, T. Kanda, H. Ishiguro, and N. Hagita, “Interactive humanoid robots for a science museum,” IEEE Intelligent Systems, Vol.22, No.2, pp. 25-32, 2007. https://doi.org/10.1109/MIS.2007.37
- [21] J. W. Tukey, “The problem of multiple comparisons,” Chapman and Hall, 1953.
- [22] C. Y. Kramer, “Extension of multiple range tests to group means with unequal numbers of replications,” Biometrics, Vol.12, No.3, pp. 307-310, 1956. https://doi.org/10.2307/3001469
- [23] J. M. Bland and D. G. Altman, “Multiple significance tests: The Bonferroni method,” BMJ, Vol.310, No.6973, p. 170, 1995. https://doi.org/10.1136/bmj.310.6973.170
- [24] J. Cohen, “The statistical power of abnormal-social psychological research: A review,” The J. of Abnormal and Social Psychology, Vol.65, No.3, pp. 145-153, 1962. https://doi.org/10.1037/h0045186
- [25] E. L. Deci and R. M. Ryan, “Intrinsic Motivation and Self-Determination in Human Behavior,” Springer, 1985. https://doi.org/10.1007/978-1-4899-2271-7
- [26] B. J. Zimmerman, “A social cognitive view of self-regulated academic learning,” J. of Educational Psychology, Vol.81, No.3, pp. 329-339, 1989. https://doi.org/10.1037/0022-0663.81.3.329
- [27] Cabinet Office, Government of Japan, “Mishugakujito oyobi korei untensha no kotsu anzen kinkyu taisaku ni tsuite,” (in Japanese). https://www8.cao.go.jp/koutu/taisaku/r02kou_haku/zenbun/genkyo/feature/feature_01_3.html [Accessed April 1, 2026]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.