Paper:
Development of Fixed-Wing VTOL UAVs with the Four-Retractable Rotor Propulsion
Kaspul Anuar*,** and Naoyuki Takesue*

*Tokyo Metropolitan University
6-6 Asahigaoka, Hino, Tokyo 191-0065, Japan
**University of Riau
Kampus Bina Widya Km 12, 5 Simpang Baru, Pekanbaru 28293, Indonesia

The operational ease of fixed-wing vertical take-off landing (VTOL) unmanned aerial vehicle (UAVs) derives from their capability to take off and land vertically. This particular capability is achieved through the utilization of an additional rotor propulsion system that operates during take-off and landing. However, the rotor propulsion system, located externally to the airframe, contributes to increasing drag force, especially during the cruise phase, reducing the efficiency and flight time. To overcome the issues, this study proposes a design for a fixed-wing VTOL UAV with the four-retractable rotor propulsion, demonstrating its feasibility and performance through flow simulation and flight tests. During flight tests at a speed of 18 m/s, UAVs with (folded UAV) and without retractable propulsion systems (unfolded UAV) can maintain cruise speeds of 18 m/s at throttle openings of 56.3% and 72.1%, respectively. The energy consumption was reduced by 33.0% followed by increasing in endurance of 32.0%. It aligns with the simulation results, which show that the four-retractable rotor propulsion can reduce the drag coefficient by 35.9% and increase the aerodynamic efficiency (CL/CD) by 58.3% compared to the unfolded UAV. Both results confirm that the four-retractable rotor propulsion significantly reduces the aerodynamic drag, and increases the efficiency and endurance.
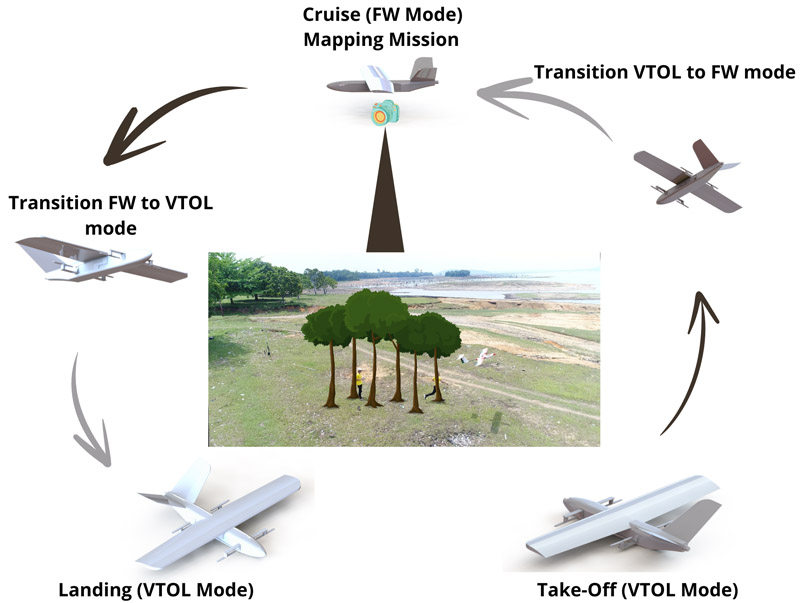
Flight phase configuration of VTOL UAVs
- [1] S. Sonkar, P. Kumar, Y. T. Puli, R. C. George, D. Philip, and A. K. Ghosh, “Design & implementation of an electric fixed-wing hybrid vtol uav for asset monitoring,” J. of Aerospace Technology and Management, Vol.15, Article No.e0823, 2023. https://doi.org/10.1590/jatm.v15.1297
- [2] K. Anuar, M. Akbar, H. A. Aziz, and A. Soegihin, “Experimental test on aerodynamic performance of propeller and its effect on the flight performance of serindit v-2 uav,” J. of Advanced Research in Fluid Mechanics and Thermal Sciences, Vol.91, No.2, pp. 120-132, 2022. https://doi.org/10.37934/arfmts.91.2.120132
- [3] H. Ucgun, U. Yuzgec, and C. Bayilmis, “A review on applications of rotary-wing unmanned aerial vehicle charging stations,” Int. J. of Advanced Robotic Systems, Vol.18, No.3, Article No.17298814211015863, 2021. https://doi.org/10.1177/17298814211015863
- [4] K. Hayama and H. Irie, “Trial production of vertical take-off and landing aircraft based on tricopter,” J. Robot. Mechatron., Vol.28, No.3, pp. 314-319, 2016. https://doi.org/10.20965/jrm.2016.p0314
- [5] G. J. J. Ducard and M. Allenspach, “Review of designs and flight control techniques of hybrid and convertible vtol uavs,” Aerospace Science and Technology, Vol.118, Article No.107035, 2021. https://doi.org/10.1016/j.ast.2021.107035
- [6] H. Zhang, L. Wang, T. Tian, and J. Yin, “A review of unmanned aerial vehicle low-altitude remote sensing (uav-lars) use in agricultural monitoring in china,” Remote Sensing, Vol.13, No.6, Article No.1221, 2021. https://doi.org/10.3390/rs13061221
- [7] Q. Zhao, Z. Zhou, and Z. Zhang, “Modeling and dynamic stability analysis of distributed electric propulsion tilt-rotor uav,” J. of Aircraft, Vol.60, No.6, pp. 1889-1900, 2023. https://doi.org/10.2514/1.C037208
- [8] H. Çakir and D. F. Kurtuluş, “Design and aerodynamic analysis of a vtol tilt-wing uav,” Turkish J. of Electrical Engineering and Computer Sciences, Vol.30, No.3, pp. 767-784, 2022. https://doi.org/10.55730/1300-0632.3810
- [9] C. He, Y. Jia, and D. Ma, “Optimization and analysis of hybrid electric system for distributed propulsion tilt-wing uav,” IEEE Access, Vol.8, pp. 224654-224667, 2020. https://doi.org/10.1109/ACCESS.2020.3044449
- [10] T. K. Priyambodo, A. Majid, and Z. Shouran, “Validation of quad tail-sitter vtol uav model in fixed wing mode,” J. of Robotics and Control (JRC), Vol.4, No.2, pp. 179-191, 2023. https://doi.org/10.18196/jrc.v4i2.17253
- [11] M. Peciak, W. Skarka, K. Mateja, and M. Gude, “Impact analysis of solar cells on vertical take-off and landing (vtol) fixed-wing uav,” Aerospace, Vol.10, No.3, Article No.247, 2023.
- [12] K. Anuar, W. Fatra, M. Akbar, N. Nazaruddin, S. Syafri, A. W. Sari, and R. R. Utama, “Design and aerodynamic analysis of fixed-wing vertical take-off landing (fw-vtol) uav,” J. of Advanced Research in Fluid Mechanics and Thermal Sciences, Vol.106, No.1, pp. 136-146, 2023. https://doi.org/10.37934/arfmts.106.1.136146
- [13] C. Wang, Z. Zhou, and R. Wang, “Research on dynamic modeling and transition flight strategy of vtol uav,” Applied Sciences, Vol.9, No.22, Article No.4937, 2019. https://doi.org/10.3390/app9224937
- [14] T. Urakubo, K. Wada, K. Sabe, S. Hirai, and M. Miwa, “Aerodynamic drag of a tilt-rotor uav during forward flight in rotary-wing mode,” J. Robot. Mechatron., Vol.35, No.2, pp. 417-423, 2023. https://doi.org/10.20965/jrm.2023.p0417
- [15] Z. Deng, Z. Guo, L. Wu, and Y. You, “Trajectory planning for emergency landing of vtol fixed-wing unmanned aerial vehicles,” Mobile Information Systems, Vol.2021, No.6, Article No.6289822, 2021. https://doi.org/10.1155/2021/6289822
- [16] Ö. Dündar, M. Bilici, and T. Ünler, “Design and performance analyses of a fixed wing battery vtol uav,” Engineering Science and Technology, an Int. J., Vol.23, No.5, pp. 1182-1193, 2020. https://doi.org/10.1016/j.jestch.2020.02.002
- [17] Z. Xiong, Y. Xu, Z. Wang, X. Pian, and Y. Wang, “Preliminary design method and prototype testing of a novel rotors retractable hybrid vtol uav,” IEEE Access, Vol.9, pp. 161141-161160, 2021. https://doi.org/10.1109/ACCESS.2021.3131565
- [18] G. Nugroho, Y. D. Hutagaol, and G. Zuliardiansyah, “Aerodynamic performance analysis of vtol arm configurations of a vtol plane uav using a computational fluid dynamics simulation,” Drones, Vol.6, No.12, Article No.392, 2022. https://doi.org/10.3390/drones6120392
- [19] S. A. Low, A. S. M. Al-Obaidi, S. K. Phang, and S. Lee, “Development of a hybrid vertical take-off and landing unmanned aerial vehicle for maritime application,” AIP Conf. Proc., Vol.2233, No.1, Article No.020020, 2020. https://doi.org/10.1063/5.0001359
- [20] K.-M. Min, F.-Y. Chia, and B.-H. Kim, “Design & flight test result of a small scale hybrid vtol uav,” Int. J. of Mechanical and Production Engineering Research and Development, Vol.9, No.2, pp. 203-210, 2019. https://doi.org/10.24247/ijmperdapr201919
- [21] K. Fayez, Y. Leng, T. Jardin, M. Bronz, and J.-M. Moschetta, “Conceptual design for long-endurance convertible unmanned aerial system,” AIAA Scitech 2021 Forum, Article No.1059, 2021. https://doi.org/10.2514/6.2021-1059
- [22] K. M. Tint, “Range and payload trades study on aircraft conceptual design,” Int. J. of Research Publications, Vol.20, No.1, 2019.
- [23] R. Pavithran, V. Lalith, C. Naveen, S. P. Sabari, M. S. T. A. Kumar, and V. Hariprasad, “A prototype of fixed wing uav for delivery of medical supplies,” IOP Conf. Series: Materials Science and Engineering, Vol.995, Article No.012015, 2020. https://doi.org/10.1088/1757-899X/995/1/012015
- [24] D. A. M. Bugallo, C. I. R. Jaimes, A. M. S. Castrillon, and A. S. Castrillon, “Design and aerodynamic analysis of an unmanned aerial vehicle with a fixed-wing,” Palarch’s J. of Archaeology of Egypt/Egyptology, Vol.19, No.2, pp. 615-634, 2022.
- [25] M. Hidayath and I. Taufiq, “Analisa pengaruh airfoil terhadap manuver dan kecepatan pada pesawat tanpa awak tipe fixed wing berbasis ardupilot,” Ph.D. Thesis, ITN Malang, 2022.
- [26] M. H. Sadraey, “Aircraft design: A systems engineering approach,” John Wiley & Sons, 2012. https://doi.org/10.1002/9781118352700
- [27] C. R. V. Antonio and S. Yan, “Preliminary design and performance-stability analysis of a fixed-wing uav using xflr5,” J. of Aircraft and Spacecraft Technology, Vol.7, No.1, pp. 8-16, 2023. https://doi.org/10.3844/jastsp.2023.8.16
- [28] M. F. Jamaludin, M. A. Wahid, M. N. M. Nasir, and N. Othman, “Design and analysis performance of fixed wing vtol uav,” J. of Transport System Engineering, Vol.5, No.1, pp. 17-25, 2018.
- [29] I. T. Setyadewi, “Analysis of electrical load assessment lsu (lapan surveillance uav) 03,” Jurnal Teknologi Dirgantara, Vol.17, No.1, pp. 57-66, 2019. https://doi.org/10.30536/j.jtd.2019.v17.a3108
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.