Paper:
MBEANN for Robotic Swarm Controller Design and the Behavior Analysis for Cooperative Transport
Yoshiaki Katada*
 , Takumi Hirokawa**, Motoaki Hiraga***
, and Kazuhiro Ohkura**
, Takumi Hirokawa**, Motoaki Hiraga***
, and Kazuhiro Ohkura**
*Setsunan University
17-8 Ikedanaka-machi, Neyagawa, Osaka 572-8508, Japan
**Hiroshima University
1-4-1 Kagamiyama, Higashi-hiroshima, Hiroshima 739-8527, Japan
***Kyoto Institute of Technology
Goshokaido-cho, Matsugasaki, Sakyo-ku, Kyoto 606-8585, Japan

This study focuses on mutation-based evolving artificial neural network (MBEANN), a topology and weight evolving artificial neural network (TWEANN) algorithm. TWEANN optimizes both the connection weights and neural network structure. Primarily, MBEANN uses only mutations to evolve artificial neural networks. An individual in an MBEANN is designed to have a set of sub-networks called operons. Operons are expected to have functions during evolution because they do not recombine with other operons. In this study, we applied MBEANN to design a controller for a robotic swarm on cooperative transport, where the following canonical evolving artificial neural network (EANN) methods do not work well. For comparison with MBEANN, we used an EANN with a fixed network structure and neuroevolution of augmenting topologies (NEAT), which is a widely used TWEANN algorithm. We confirmed that the robot controller that evolved with the MBEANN outperformed the structure-fixed EANN and NEAT controllers. In addition, we investigated the behavior of the swarm robot obtained using the proposed method, in which we deactivated each operon to extract its function. The results show that operons could have their functions, and that several operons could strengthen one another’s functions.
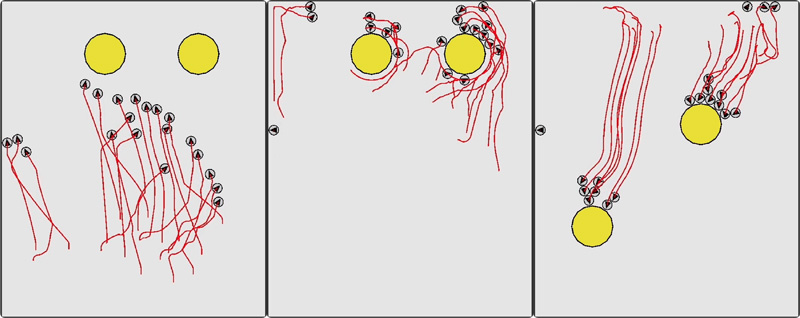
Collective behavior generated by the proposed method
- [1] E. Şahin, “Swarm robotics: From sources of inspiration to domains of application,” Swarm Robotics: SAB 2004 Int. Workshop, Lecture Notes in Computer Science, Vol.3342, pp. 10-20, 2005. https://doi.org/10.1007/978-3-540-30552-1_2
- [2] M. Brambilla, E. Ferrante, M. Birattari, and M. Dorigo, “Swarm robotics: A review from the swarm engineering perspective,” Swarm Intelligence, Vol.7, No.1, pp. 1-41, 2013. https://doi.org/10.1007/s11721-012-0075-2
- [3] S. Nolfi and D. Floreano, “Evolutionary robotics: The biology, intelligence, and technology of self-organizing machines,” MIT Press, 2000.
- [4] V. Trianni, “Evolutionary swarm robotics,” Springer Berlin, Heidelberg, 2008.
- [5] M. Hiraga and K. Ohkura, “Effects of congestion on swarm performance and autonomous specialization in robotic swarms,” J. Robot. Mechatron., Vol.31, No.4, pp. 526-534, 2019. https://doi.org/10.20965/jrm.2019.p0526
- [6] D. B. Fogel, “Blondie24: Playing at the edge of AI,” Morgan Kaufmann, 2001.
- [7] X. Yao, “Evolving artificial neural networks,” Proc. of the IEEE, Vol.87, No.9, pp. 1423-1447, 1999. https://doi.org/10.1109/5.784219
- [8] D. Floreano, P. Dürr, and C. Mattiussi, “Neuroevolution: From architectures to learning,” Evolutionary Intelligence, Vol.1, No.1, pp. 47-62, 2008. https://doi.org/10.1007/s12065-007-0002-4
- [9] V. Trianni, R. Groß, T. H. Labella, E. Şahin, and M. Dorigo, “Evolving aggregation behaviors in a swarm of robots,” European Conf. on Artificial Life, pp. 865-874, 2003. https://doi.org/10.1007/978-3-540-39432-7_93
- [10] O. Soysal, E. Bahçeci, and E. Şahin, “Aggregation in swarm robotic systems: Evolution and probabilistic control,” Turkish J. of Electrical Engineering and Computer Sciences, Vol.15, No.2, pp. 199-225, 2007.
- [11] V. Sperati, V. Trianni, and S. Nolfi, “Self-organised path formation in a swarm of robots,” Swarm Intelligence, Vol.5, No.2, pp. 97-119, 2011. https://doi.org/10.1007/s11721-011-0055-y
- [12] M. Hiraga, Y. Wei, T. Yasuda, and K. Ohkura, “Evolving autonomous specialization in congested path formation task of robotic swarms,” Artificial Life and Robotics, Vol.23, No.4, pp. 547-554, 2018. https://doi.org/10.1007/s10015-018-0483-5
- [13] R. Groß and M. Dorigo, “Towards group transport by swarms of robots,” Int. J. of Bio-Inspired Computation, Vol.1, Nos.1/2, pp. 1-13, 2009.
- [14] M. H. M. Alkilabi, A. Narayan, and E. Tuci, “Cooperative object transport with a swarm of e-puck robots: Robustness and scalability of evolved collective strategies,” Swarm Intelligence, Vol.11, No.3, pp. 185-209, 2017. https://doi.org/10.1007/s11721-017-0135-8
- [15] Y. Wei, M. Hiraga, K. Ohkura, and Z. Car, “Autonomous task allocation by artificial evolution for robotic swarms in complex tasks,” Artificial Life and Robotics, Vol.24, No.1, pp. 127-134, 2019. https://doi.org/10.1007/s10015-018-0466-6
- [16] K. Stanley and R. Miikkulainen, “Evolving neural networks through augmenting topologies,” Evolutionary Computation, Vol.10, No.2, pp. 99-127, 2002. https://doi.org/10.1162/106365602320169811
- [17] K. Ohkura, T. Yasuda, Y. Kawamatsu, Y. Matsumura, and K. Ueda, “MBEANN: Mutation-based evolving artificial neural networks,” Advances in Artificial Life: 9th European Conf. on Artificial Life 2007, Vol.4648, pp. 936-945, 2007. https://doi.org/10.1007/978-3-540-74913-4_94
- [18] C. R. Kube and H. Zhang, “Collective robotics: From social insects to robots,” Adaptive Behavior, Vol.2, No.2, pp. 189-218, 1993. https://doi.org/10.1177/105971239300200204
- [19] S. Yamada and J. Saito, “Adaptive action selection without explicit communication for multirobot box-pushing,” IEEE Trans. on Systems, Man, and Cybernetics, Part C (Applications and Reviews), Vol.31, No.3, pp. 398-404, 2001. https://doi.org/10.1109/5326.971668
- [20] H. Sugie, Y. Inagaki, S. Ono, H. Aisu, and T. Unemi, “Placing objects with multiple mobile robots-mutual help using intention inference,” Proc. of 1995 IEEE Int. Conf. on Robotics and Automation, Vol.2, pp. 2181-2186, 1995. https://doi.org/10.1109/ROBOT.1995.525583
- [21] Y. Wang and C. W. de Silva, “Cooperative transportation by multiple robots with machine learning,” 2006 IEEE Int. Conf. on Evolutionary Computation, pp. 3050-3056, 2006. https://doi.org/10.1109/CEC.2006.1688694
- [22] M. A. Neumann, M. H. Chin, and C. A. Kitts, “Object manipulation through explicit force control using cooperative mobile multi-robot systems,” Proc. of the World Congress on Engineering and Computer Science, Vol.1, 2014.
- [23] R. Fujisawa, H. Imamura, and F. Matsuno, “Cooperative transportation by swarm robots using pheromone communication,” Distributed Autonomous Robotic Systems, pp. 559-570, 2013. https://doi.org/10.1007/978-3-642-32723-0_40
- [24] M. Hiraga and K. Ohkura, “Topology and weight evolving artificial neural networks in cooperative transport by a robotic swarm,” Artificial Life and Robotics, Vol.27, No.2, pp. 324-332, 2022. https://doi.org/10.1007/s10015-021-00716-9
- [25] M. Kimura, “The neutral theory of molecular evolution,” Scientific American, Vol.241, No.5, pp. 98-129, 1979.
- [26] J.-B. Mouret and S. Doncieux, “Incremental evolution of animats’ behaviors as a multi-objective optimization,” Int. Conf. on Simulation of Adaptive Behavior, pp. 210-219, 2008. https://doi.org/10.1007/978-3-540-69134-1_21
- [27] D. Bajaj and M. H. Ang Jr., “An Incremental Approach in Evolving Robot Behavior,” Proc. of the 6th Int. Conf. on Control, Automation, Robotics and Vision, 2000.
- [28] H.-G. Beyer and H.-P. Schwefel, “Evolution strategies–A comprehensive introduction,” Natural Computing, Vol.1, No.1, pp. 3-52, 2002. https://doi.org/10.1023/A:1015059928466
- [29] B. Hall, A. Limaye, and A. B. Kulkarni, “Overview: Generation of gene knockout mice,” Current Protocols in Cell Biology, 2009. https://doi.org/10.1002/0471143030.cb1912s44
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.