Review:
Review of Interdisciplinary Approach to Swarm Intelligence
Takeshi Kano

Research Institute of Electrical Communication, Tohoku University
2-1-1 Katahira, Aoba-ku, Sendai, Miyagi 980-8577, Japan

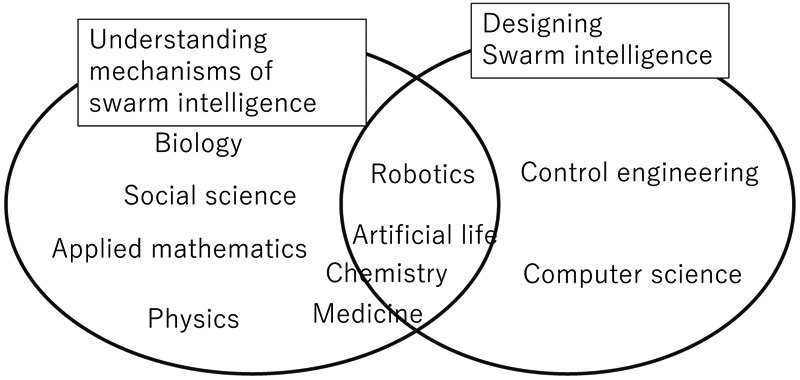
Swarm intelligence is intelligence produced by multiple agents interacting with each other according to a simple set of rules, resulting in a system-wide intelligence. Such intelligence is found in a wide range of biological and social systems, and attempts have been made to understand the underlying principles through analytical approaches by biologists and sociologists and synthetic approaches by mathematical scientists and engineers. On the other hand, there are also attempts to construct artificial swarm intelligence systems that are not necessarily based on real-world phenomena. This review describes recent interdisciplinary research on swarm intelligence and its future prospects.
Interdisciplinary approaches to swarm intelligence
- [1] J. Krause, G. D. Ruxton, and S. Krause, “Swarm Intelligence in Animals and Humans,” Trends in Ecology and Evolution, Vol.25, pp. 28-34, 2010. https://doi.org/10.1016/j.tree.2009.06.016
- [2] R. Suzuki, M. Ito, S. Kodera, K. Nishimoto, and T. Arita, “An Online Experimental Framework for Cooperative Relationships With a Real-Time Decision-Making and Rewarding Environment,” Frontiers in Ecology and Evolution, Vol.6, Article No.74, 2018. https://doi.org/10.3389/fevo.2018.00074
- [3] T. Miura, K. Oguchi, H. Yamaguchi, M. Nakamura, D. Sato, K. Kobayashi, N. Kutsukake, K. Miura, Y. Hayashi, M. Hojo, K. Maekawa, S. Shigenobu, T. Kano, and A. Ishiguro, “Understanding of Superorganisms: Collective Behavior, Differentiation and Social Organization,” Artificial Life and Robotics, Vol.27, No.2, pp. 204-212, 2022. https://doi.org/10.1007/s10015-022-00754-x
- [4] O. Shishkov and O. Peleg, “Social Insects and Beyond: The Physics of Soft, Dense Invertebrate Aggregations,” Collective Intelligence, Vol.1, No.2, 2022. https://doi.org/10.1177/26339137221123758
- [5] E. Bonabeau, M. Dorigo, and G. Theraulaz, “Swarm Intelligence: From Natural to Artificial Systems,” Oxford Academic, 2020. https://doi.org/10.1093/oso/9780195131581.001.0001
- [6] T. Sugi, H. Ito, M. Nishimura, and K. H. Nagai, “C. elegans collectively forms dynamical networks,” Nat. Commun., Vol.10, Article No.683, 2019. https://doi.org/10.1038/s41467-019-08537-y
- [7] O. Yamanaka, M. Shiraishi, A. Awazu, and H. Nishimori, “Verification of mathematical models of response threshold through statistical characterisation of the foraging activity in ant societies,” Sci. Rep., Vol.9, Article No.8845, 2019. https://doi.org/10.1038/s41598-019-45367-w
- [8] T. Schmickl and K. Crailsheim, “Cannibalism and early capping: strategy of honeybee colonies in times of experimental pollen shortages,” J. Comp. Physiol., Vol.187, pp. 541-547, 2001. https://doi.org/10.1007/s003590100226
- [9] J. Liu, A. Prindle, J. Humphries, J. Humphries, M. Gabalda-Sagarra, M. Asally, D.-y. D. Lee, S. Ly, J. Garcia-Ojalvo, and G. M. Süel, “Metabolic co-dependence gives rise to collective oscillations within biofilms,” Nature, Vol.523, pp. 550-554, 2015. https://doi.org/10.1038/nature14660
- [10] T. Hirashima, E. G. Rens, and R. M. H. Merks, “Cellular Potts modeling of complex multicellular behaviors in tissue morphogenesis,” Development, Growth & Differentiation, Vol.59, No.5, pp. 329-339, 2017. https://doi.org/10.1111/dgd.12358
- [11] T. Lämmermann, P. V. Afonso, B. R. Angermann, J. M. Wang, W. Kastenmüller, C. A. Parent, and R. N. Germain, “Neutrophil swarms require LTB4 and integrins at sites of cell death in vivo,” Nature, Vol.498, pp. 371-375, 2013. https://doi.org/10.1038/nature12175
- [12] A. Takamatsu, R. Tanaka, H. Yamada, T. Nakagaki, T. Fujii, and I. Endo, “Spatiotemporal Symmetry in Rings of Coupled Biological Oscillators of Physarum Plasmodial Slime Mold,” Phys. Rev. Lett., Vol.87, Article No.078102, 2001. https://doi.org/10.1103/PhysRevLett.87.078102
- [13] T. Nakagaki, H. Yamada, and Á Tóth, “Maze-solving by an amoeboid organism,” Nature, Vol.407, Article No.470, 2000. https://doi.org/10.1038/35035159
- [14] Y. H. Tee, W. J. Goh, X. Yong et al., “Actin polymerisation and crosslinking drive left-right asymmetry in single cell and cell collectives,” Nat. Commun., Vol.14, Article No.776, 2023. https://doi.org/10.1038/s41467-023-35918-1
- [15] S. Kriegman, D. Blackiston, M. Levin, and J. Bongard, “A scalable pipeline for designing reconfigurable organisms,” Proc. of the National Academy of Sciences, Vol.117, No.4, pp. 1853-1859, 2020. https://doi.org/10.1073/pnas.1910837117
- [16] S. Hauert and S. N. Bhatia, “Mechanisms of cooperation in cancer nanomedicine: Towards systems nanotechnology,” Trends in Biotechnology, Vol.32, No.9, pp. 448-455, 2014. https://doi.org/10.1016/j.tibtech.2014.06.010
- [17] T. Gregor, K. Fujimoto, N. Masaki, and S. Sawai, “The Onset of Collective Behavior in Social Amoebae,” Science, Vol.328, No.5981, pp. 1021-1025, 2010. https://doi.org/10.1126/science.1183415
- [18] K. Sato, T. Hiraiwa, E. Maekawa, A. Isomura, T. Shibata, and E. Kuranaga, “Left–right asymmetric cell intercalation drives directional collective cell movement in epithelial morphogenesis,” Nat. Commun., Vol.6, Article No.10074, 2015. https://doi.org/10.1038/ncomms10074
- [19] G. Beni, “From Swarm Intelligence to Swarm Robotics,” E. Sahin and W. M. Spears (Eds.), “Swarm Robotics,” pp. 1-9, Berlin, Heidelberg: Springer, 2005. https://doi.org/10.1007/978-3-540-30552-1_1
- [20] R. Pfeifer and J. Bongard, “How the Body Shapes the Way We Think: A New View of Intelligence,” Cambridge, MA: MIT Press, 2006. https://doi.org/10.7551/mitpress/3585.001.0001
- [21] G. Beni and J. Wang, “Swarm Intelligence in Cellular Robotic Systems,” P. Dario, G. Sandini, and P. Aebischer (Eds.), “Robots and Biological Systems: Towards a New Bionics?,” pp. 703-712, Berlin, Heidelberg: Springer, 1993. https://doi.org/10.1007/978-3-642-58069-7_38
- [22] A. Schumann, “Swarm Intelligence: From Social Bacteria to Humans,” CRC Press, 2021. https://doi.org/10.1201/9780429028618
- [23] F. Matsuno, “From Understanding of Swarm Behaviors to Creation of Swarm Intelligence,” J. of The Society of Instrument and Control Engineers, Vol.59, No.2, pp. 141-144, 2020 (in Japanese). https://doi.org/10.11499/sicejl.59.141
- [24] X.-S. Yang, Z. Cui, R. Xiao, A. H. Gandomi, and M. Karamanoglu, “Swarm Intelligence and Bio-Inspired Computation: Theory and Applications,” Elsevier, 2013. https://doi.org/10.1016/B978-0-12-405163-8.00001-6
- [25] A. E. Hassanien and E. Emary, “Swarm Intelligence: Principles, Advances, and Applications,” CRC Press, 2016. https://doi.org/10.1201/9781315222455
- [26] J. Kennedy, R. C. Eberhart, and Y. Shi, “Swarm Intelligence,” Elsevier, 2001. https://doi.org/10.1016/B978-1-55860-595-4.X5000-1
- [27] D. Floreano and C. Mattiussi, “Bio-Inspired Artificial Intelligence: Theories, Methods, and Technologies,” MIR Press, 2008.
- [28] H. Hamann, “Swarm Robotics: A Formal Approach,” Springer, 2018. https://doi.org/10.1007/978-3-319-74528-2
- [29] M. Rubenstein, C. Ahler, N. Hoff, A. Cabrera, and R. Nagpal, “Kilobot: A low cost robot with scalable operations designed for collective behaviors,” Robotics and Autonomous Systems, Vol.62, No.7, pp. 966-975, 2014. https://doi.org/10.1016/j.robot.2013.08.006
- [30] M. Dorigo, V. Trianni, E. Sahin, R. Groß, T. H. Labella, G. Baldassarre, S. Nolfi, J.-L. Deneubourg, F. Mondada, D. Floreano, and L. M. Gambardella, “Evolving Self-Organizing Behaviors for a Swarm-bot,” Autonomous Robots, Vol.17, pp. 223-245, 2004. https://doi.org/10.1023/B:AURO.0000033973.24945.f3
- [31] N. Funayama, Y. Sato, K. Matsumoto, T. Ogura, and Y. Takahashi, “Coelom formation: Binary decision of the lateral plate mesoderm is controlled by the ectoderm,” Development, Vol.126, No.18, pp. 4129-4138, 1999. https://doi.org/10.1242/dev.126.18.4129
- [32] K. Shirai, K. Shimamura, A. Koubara, S. Shigaki, and R. Fujisawa, “Development of a behavioral trajectory measurement system (Bucket-ANTAM) for organisms moving in a two-dimensional plane,” Artificial Life and Robotics, Vol.27, pp. 698-705, 2022. https://doi.org/10.1007/s10015-022-00811-5
- [33] T. Vicsek, A. Czirok, E. Ben-Jacob, I. Cohen, and O. Shochet, “Novel Type of Phase Transition in a System of Self-Driven Particles,” Physical Review Letters, Vol.75, No.6, pp. 1226-1229, 1995. https://doi.org/10.1103/PhysRevLett.75.1226
- [34] C. W. Reynolds, “Flocks, Herds, and Schools: A Distributed Behavior Model,” Computer Graphics, Vol.21, No.4, pp. 25-34, 1987.
- [35] H. Sayama, “Swarm chemistry,” Artificial Life, Vol.15, No.1, pp. 105-114, 2009. https://doi.org/10.1162/artl.2009.15.1.15107
- [36] T. Kano, K. Osuka, T. Kawakatsu, and A. Ishiguro, “Mathematical Analysis for Non-reciprocal-interaction-based Model of Collective Behavior,” J. of the Physical Society of Japan, Vol.86, Article No.124004, 2017. https://doi.org/10.7566/JPSJ.86.124004
- [37] T. Kano, M. Iwamoto, and D. Ueyama, “Decentralised Control of Multiple Mobile Agents for Quick, Smooth, and Safe Movement,” Physica A: Statistical Mechanics and its Applications, Vol.572, Article No.125898, 2021. https://doi.org/10.1016/j.physa.2021.125898
- [38] M. Akter and A. Kakugo, “Biomolecular Motor-Based Swarm Robot: An Innovation in Molecular Delivery,” J. Robot. Mechatron., Vol.35, No.4, pp. 1047-1051, 2023. https://doi.org/10.20965/jrm.2023.p1047
- [39] N. Kaneko and T. Ishimaru, “Swarm Behavior of Adult-Born Neurons During Migration in a Non-Permissive Environment,” J. Robot. Mechatron., Vol.35, No.4, pp. 896-900, 2023. https://doi.org/10.20965/jrm.2023.p0896
- [40] R. Okada, H. Ikeno, H. Aonuma, M. Sakura, and E. Ito, “Honey Bee Waggle Dance as a Model of Swarm Intelligence,” J. Robot. Mechatron., Vol.35, No.4, pp. 901-910, 2023. https://doi.org/10.20965/jrm.2023.p0901
- [41] S. Nomoto, Y. Hattori, and D. Kurabayashi, “Swarm Search Algorithm Based on Chemotactic Behaviors of Caenorhabditis elegans Nematodes,” J. Robot. Mechatron., Vol.35, No.4, pp. 911-917, 2023. https://doi.org/10.20965/jrm.2023.p0911
- [42] C. Oosawa, “Group Chase and Escape with Chemotaxis,” J. Robot. Mechatron., Vol.35, No.4, pp. 918-921, 2023. https://doi.org/10.20965/jrm.2023.p0918
- [43] H. Murakami, M. S. Abe, and Y. Nishiyama, “Toward Comparative Collective Behavior to Discover Fundamental Mechanisms Underlying Behavior in Human Crowds and Nonhuman Animal Groups,” J. Robot. Mechatron., Vol.35, No.4, pp. 922-930, 2023. https://doi.org/10.20965/jrm.2023.p0922
- [44] D. Umetsu, S. Yamaji, D. Wakita, and T. Kano, “Quantitative Analysis of the Coordinated Movement of Cells in a Freely Moving Cell Population,” J. Robot. Mechatron., Vol.35, No.4, pp. 931-937, 2023. https://doi.org/10.20965/jrm.2023.p0931
- [45] Y. Sueoka, W. J. Yong, N. Takebe, Y. Sugimoto, and K. Osuka, “Effect of Robotic Pile-Up Mechanism on Cooperative Transportation for Versatile Objects,” J. Robot. Mechatron., Vol.35, No.4, pp. 938-947, 2023. https://doi.org/10.20965/jrm.2023.p0938
- [46] Y. Sueoka, M. Okada, Y. Tsunoda, Y. Sugimoto, and K. Osuka, “Exploration of a Simple Navigation Method for Swarm Robots Pioneered by Heterogeneity,” J. Robot. Mechatron., Vol.35, No.4, pp. 948-956, 2023. https://doi.org/10.20965/jrm.2023.p0948
- [47] Y. Tsunoda, L. T. Nghia, Y. Sueoka, and K. Osuka, “Experimental Analysis of Shepherding-Type Robot Navigation Utilizing Sound-Obstacle-Interaction,” J. Robot. Mechatron., Vol.35, No.4, pp. 957-968, 2023. https://doi.org/10.20965/jrm.2023.p0957
- [48] K. Yamagishi and T. Suzuki, “Cooperative Passing Based on Chaos Theory for Multiple Robot Swarms,” J. Robot. Mechatron., Vol.35, No.4, pp. 969-976, 2023. https://doi.org/10.20965/jrm.2023.p0969
- [49] D. Morimoto, Y. Iwamoto, M. Hiraga, and K. Ohkura, “Generating Collective Behavior of a Multi-Legged Robotic Swarm Using Deep Reinforcement Learning,” J. Robot. Mechatron., Vol.35, No.4, pp. 977-987, 2023. https://doi.org/10.20965/jrm.2023.p0977
- [50] M. Hiraga, D. Morimoto, Y. Katada, and K. Ohkura, “When Less Is More in Embodied Evolution: Robotic Swarms Have Better Evolvability with Constrained Communication,” J. Robot. Mechatron., Vol.35, No.4, pp. 988-996, 2023. https://doi.org/10.20965/jrm.2023.p0988
- [51] Y. Katada, T. Hirokawa, M. Hiraga, and K. Ohkura, “MBEANN for Robotic Swarm Controller Design and the Behavior Analysis for Cooperative Transport,” J. Robot. Mechatron., Vol.35, No.4, pp. 997-1006, 2023. https://doi.org/10.20965/jrm.2023.p0997
- [52] R. Asad, T. Hayakawa, and T. Yasuda, “Evolutionary Design of Cooperative Transport Behavior for a Heterogeneous Robotic Swarm,” J. Robot. Mechatron., Vol.35, No.4, pp. 1007-1015, 2023. https://doi.org/10.20965/jrm.2023.p1007
- [53] M. Kubo, H. Sato, and A. Yamaguchi, “Consensus Building in Box-Pushing Problem by BRT Agent that Votes with Frequency Proportional to Profit,” J. Robot. Mechatron., Vol.35, No.4, pp. 1016-1027, 2023. https://doi.org/10.20965/jrm.2023.p1016
- [54] T. Murayama and A. Iwasaki, “Bi-Connectivity Control for Multi-Robot Network Considering Line-of-Sight Communication,” J. Robot. Mechatron., Vol.35, No.4, pp. 1028-1037, 2023. https://doi.org/10.20965/jrm.2023.p1028
- [55] Y. Sugimoto, K. Naniwa, D. Nakanishi, and K. Osuka, “Tension Control of a McKibben Pneumatic Actuator Using a Dynamic Quantizer,” J. Robot. Mechatron., Vol.35, No.4, pp. 1038-1046, 2023. https://doi.org/10.20965/jrm.2023.p1038
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.