Paper:
A Map Creation for LiDAR Localization Based on the Design Drawings and Tablet Scan Data
Satoshi Ito
 , Ryutaro Kaneko, Takumi Saito, and Yuji Nakamura
, Ryutaro Kaneko, Takumi Saito, and Yuji Nakamura
Gifu University
1-1 Yanagido, Gifu 501-1193, Japan

This paper proposes a method for the point cloud data (PCD) map creation for the 3D LiDAR localization. The features of the method include the creation of a PCD map from a drawing of the buildings and partial scan of the not-existing object of the map by the tablet computer with the LiDAR. In the former, a map creation procedure, including the up- and down-sampling, as well as the processing, with voxel grid filter is established. In the latter, automatic position correction of the tablet scan data is introduced when they are placed to the current PCD map. Experiments are conducted to determine the size of the voxel grid filter and prove the effect of the tablet scan data in enhancing the matching level and the localization accuracy. Finally, the experiment with an autonomous mobile robot demonstrates that a map created using the proposed method is sufficient for autonomous driving without losing the localization.
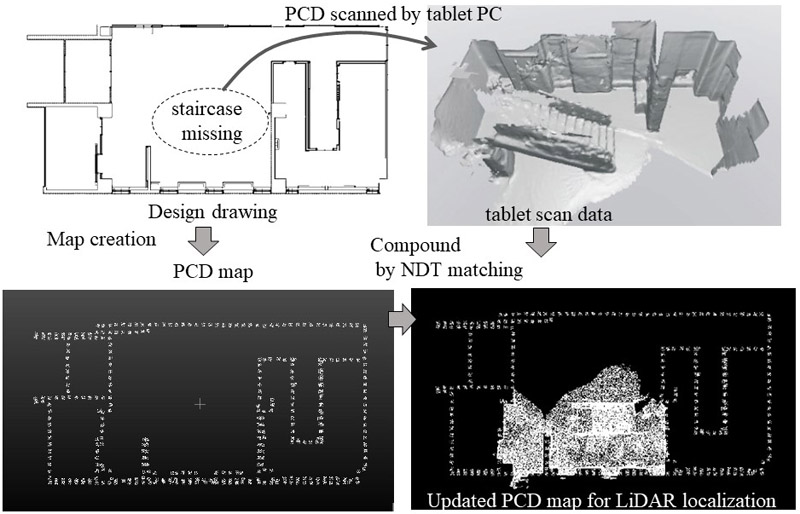
Map creation process
- [1] M. Tomono, “Simultaneous Localization and Mapping,” Ohmsha, 2018 (in Japanese).
- [2] M. U. Khan, S. A. A. Zaidi, A. Ishtiaq, S. U. R. Bukhari, S. Samer, and A. Farman, “A comparative survey of LiDAR-SLAM and LiDAR based sensor technologies,” 2021 Mohammad Ali Jinnah University Int. Conf. on Computing (MAJICC), pp. 1-8, 2021.
- [3] M. Chghaf, S. Rodriguez, and A. E. Ouardi, “Camera, LiDAR and multi-modal SLAM systems for autonomous ground vehicles: a survey,” J. of Intelligent & Robotic Systems, Vol.105, No.1, pp. 1-35, 2022.
- [4] B. Schwarz, “Mapping the world in 3D,” Nature Photonics, Vol.4, No.7, pp. 429-430, 2010.
- [5] X. Gu, X. Wang, and Y. Guo, “A review of research on point cloud registration methods,” IOP Conf. Series: Materials Science and Engineering, Vol.782, Article No.022070, IOP Publishing, 2020.
- [6] P. Biber and W. Straßer, “The normal distributions transform: A new approach to laser scan matching,” Proc. 2003 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2003), Vol.3, pp. 2743-2748, 2003.
- [7] M. Magnusson, A. Lilienthal, and T. Duckett, “Scan registration for autonomous mining vehicles using 3D-NDT,” J. of Field Robotics, Vol.24, No.10, pp. 803-827, 2007.
- [8] T. Takubo, T. Kaminade, Y. Mae, K. Ohara, and T. Arai, “NDT scan matching method for high resolution grid map,” 2009 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1517-1522, 2009.
- [9] J. P. Saarinen, H. Andreasson, T. Stoyanov, and A. J. Lilienthal, “3D normal distributions transform occupancy maps: An efficient representation for mapping in dynamic environments,” The Int. J. of Robotics Research, Vol.32, No.14, pp. 1627-1644, 2013.
- [10] A. Yilmaz, E. Sumer, and H. Temeltas, “A precise scan matching based localization method for an autonomously guided vehicle in smart factories,” Robotics and Computer-Integrated Manufacturing, Vol.75, Article No.102302, 2022.
- [11] Z. Zhou, L. Li, A. Fürsterling, H. J. Durocher, J. Mouridsen, and X. Zhang, “Learning-based object detection and localization for a mobile robot manipulator in sme production,” Robotics and Computer-Integrated Manufacturing, Vol.73, Article No.102229, 2022.
- [12] M. Pinto, H. Sobreira, A. P. Moreira, H. Mendonca, and A. Matos, “Self-localisation of indoor mobile robots using multi-hypotheses and a matching algorithm,” Mechatronics, Vol.23, No.6, pp. 727-737, 2013.
- [13] S. Zhang, X. Tan, and Q. Wu, “Self-positioning for mobile robot indoor navigation based on wheel odometry, inertia measurement unit and ultra wideband,” 2021 5th Int. Conf. on Vision, Image and Signal Processing (ICVISP), pp. 105-110, 2021.
- [14] K. Takahashi, J. Arima, T. Hayata, Y. Nagai, N. Sugiura, R. Fukatsu, W. Yoshiuchi, and Y. Kuroda, “Development of edge-node map based navigation system without requirement of prior sensor data collection,” J. Robot. Mechatron., Vol.32, No.6, pp. 1112-1120, 2020.
- [15] S. Hoshino and H. Yagi, “Mobile robot localization using map based on cadastral data for autonomous navigation,” J. Robot. Mechatron., Vol.34, No.1, pp. 111-120, 2022.
- [16] R. Wang, J. Peethambaran, and D. Chen, “LiDAR point clouds to 3-D urban models: a review,” IEEE J. of Selected Topics in Applied Earth Observations and Remote Sensing, Vol.11, No.2, pp. 606-627, 2018.
- [17] S. Ochmann, R. Vock, R. Wessel, and R. Klein, “Automatic reconstruction of parametric building models from indoor point clouds,” Computers & Graphics, Vol.54, pp. 94-103, 2016.
- [18] J. R. Parent, C. Witharana, and M. Bradley, “Mapping building interiors with LiDAR: Classifying the point cloud with ArcGIS,” Int. Archives of the Photogrammetry, Remote Sensing & Spatial Information Sciences, 2021.
- [19] K. Babacan, L. Chen, and G. Sohn, “Semantic segmentation of indoor point clouds using convolutional neural network,” ISPRS Annals of Photogrammetry, Remote Sensing & Spatial Information Sciences, Vol.4, pp. 101-108, 2017.
- [20] Y. Wang, Z. Zhang, R. Zhong, L. Sun, S. Leng, and Q. Wang, “Densely connected graph convolutional network for joint semantic and instance segmentation of indoor point clouds,” ISPRS J. of Photogrammetry and Remote Sensing, Vol.182, pp. 67-77, 2021.
- [21] Y. Wu, Z. Yan, S. Cai, G. Li, Y. Yu, X. Han, and S. Cui, “Pointmatch: A consistency training framework for weakly supervisedsemantic segmentation of 3D point clouds,” arXiv preprint arXiv:2202.10705, 2022.
- [22] E. Takeuchi and T. Tsubouchi, “A 3-D scan matching using improved 3-D normal distributions transform for mobile robotic mapping,” 2006 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3068-3073, 2006.
- [23] R. Kaneko, Y. Nakamura, R. Morita, and S. Ito, “PCD map creation from factory design drawing for LiDAR self-localization of autonomous mobile robot,” Proc. of the Twenty-Seventh Int. Symposium on Artificial Life and Robotics 2022 (AROB 2022), pp. 569-574, 2022.
- [24] Y. Kitsukawa, S. Kato, N. Akai, E. Takeuchi, and M. Edahiro, “Field testing of self-driving vehicles: lessons learned on localization,” Int. Association of Traffic and Safety Science, Vol.42, No.2, pp. 48-53, 2017.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.