Paper:
Development of Haptic Interface for Neurosurgical Simulators with Micro Scissors Module for Displaying the Cutting Force
Teppei Tsujita*1, Yuto Inoue*2, Yutaka Takagi*3, Atsushi Konno*4, Satoko Abiko*5, Xin Jiang*6, Atsuhiro Nakagawa*7, and Masaru Uchiyama*8
*1Department of Mechanical Engineering, National Defense Academy of Japan
1-10-20 Hashirimizu, Yokosuka, Kanagawa 239-8686, Japan
*2Mitsubishi Electric Engineering Co., Ltd.
1 Hishimachi, Inazawa, Aichi 492-8161, Japan
*3Kajima Co., Ltd.
19-1 Tobitakyu 2-chome, Chofu, Tokyo 182-0036, Japan
*4Graduate School of Information Science and Technology, Hokkaido University
Kita 14, Nishi 9, Kita-ku, Sapporo, Hokkaido 060-0814, Japan
*5Department of Electrical Engineering, Shibaura Institute of Technology
3-7-5 Toyosu, Koto-ku, Tokyo 108-8548, Japan
*6School of Mechanical Engineering and Automation, Harbin Institute of Technology
HIT Campus of University Town of Shenzhen, Shenzhen 518055, China
*7Department of Neurosurgery, Graduate School of Medicine, Tohoku University
1-1 Seiryo-machi, Aoba-ku, Sendai, Miyagi 980-8574, Japan
*8Tohoku University
2-1-1 Katahira, Aoba-ku, Sendai, Miyagi 980-8577, Japan

Introduction of surgical simulators, which enable repeated learning of new surgical techniques, is advancing and they are desired in the field of neurosurgery. This study aims to make a two-fold contribution. First is the development of a haptic interface, which can be used while changing the operative tools necessary for training the cerebral fissure opening technique while using both the hands. Second is to develop a module for the haptic interface, which can display the cutting force when using micro scissors. To realize the operation with both the hands, the haptic interfaces for the right and left hands are designed so that they do not interfere. In addition, surgical tools, such as retractors, micro dissectors, and micro scissors, can be exchanged. In the cutting experiment carried out prior to the development of the haptic interface, it was clarified that the force when the dura mater was cut using micro scissors was 0.5 N. For comparison, the cutting forces required to cut two and three sheets of paper were measured to be 0.4 N and 0.6 N, respectively. The developed micro scissors module was designed using one motor and planetary gear mechanism. The gear mechanism is designed such that the right and left handles rotate in reverse directions around the rotation axis of the micro scissors using only one motor. This mechanism enables the micro scissors to cut the virtual tissues in the middle of the blade. The developed module could display a force of 0.4 N.
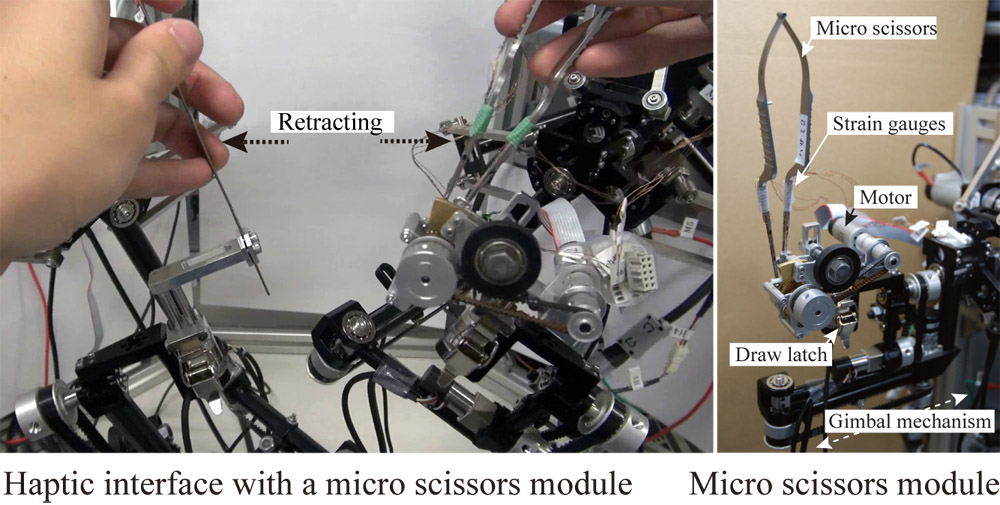
Haptic interface for neurosurgical simulators
- [1] T. R. Coles, D. Meglan, and N. W. John, “The Role of Haptics in Medical Training Simulators: A Survey of the State of the Art,” IEEE Trans. on Haptics, Vol.4, No.1, pp. 51-66, 2011.
- [2] K. Hongo, S. Kobayashi, A. Yokoh, and K. Sugita, “Monitoring retraction pressure on the brain,” J. of Neurosurgery, Vol.66, pp. 270-275, 1987.
- [3] J. Zhong, M. Dujovny, A. R. Perlin, E. Perez-Arjona, H. K. Park, and F. G. Diaz, “Brain retraction injury,” Neurological Research, Vol.25, pp. 831-838, 2003.
- [4] S. Chan, F. Conti, K. Salisbury, and N. H. Blevins, “Virtual reality simulation in neurosurgery: technologies and evolution,” Neurosurgery, Vol.72, pp. 154-164, 2013.
- [5] R. Rehder, M. Abd-El-Barr, K. Hooten, P. Weinstock, J. R. Madsen, and A. R. Cohen, “The role of simulation in neurosurgery,” Child’s Nervous System, Vol.32, No.1, pp. 43-54, 2016.
- [6] P. Wang, A. A. Becker, I. A. Jones, A. T. Glover, S. D. Benford, C. M. Greenhalgh, and M. Vloeberghs, “A virtual reality surgery simulation of cutting and retraction in neurosurgery with force-feedback,” Computer Methods and Programs in Biomedicine, Vol.84, No.1, pp. 11-18, 2006.
- [7] P. P. Banerjee, C. J. Luciano, G. M. Lemole, F. T. Charbel, and M. Y. Oh, “Accuracy of ventriculostomy catheter placement using a head- and hand-tracked high-resolution virtual reality simulator with haptic feedback,” J. of Neurosurgery, Vol.107, No.3, pp. 515-521, 2007.
- [8] H. Ghandorh, J. Mackenzie, R. Eagleson, and S. d. Ribaupierre, “Development of Augmented Reality Training Simulator Systems for Neurosurgery Using Model-Driven Software Engineering,” Proc. of the IEEE 30th Canadian Conf. on Electrical and Computer Engineering, pp. 1-6, 2017.
- [9] S. Delorme, D. Laroche, R. DiRaddo, and R. F. Del Maestro, “NeuroTouch: a physics-based virtual simulator for cranial microneurosurgery training,” Neurosurgery, Vol.71, No.1 Suppl Operative, pp. 32-42, 2012.
- [10] J.-G. Demers, J. Boelen, and I. Sinclair, “Freedom 6S Force Feedback Hand Controller,” IFAC Proc. Volumes, Vol.31, pp. 115-120, 1998.
- [11] X. Chen, K. Sase, T. Tsujita, and A. Konno, “A Simple Deformation and Reaction Force Numerical Calculation Method for Nonlinear Brain Tissues,” Proc. of the 2020 IEEE/SICE Int. Symposium on System Integration, pp. 1388-1393, 2020.
- [12] W. Hou, P. X. Liu, and M. Zheng, “Modeling of connective tissue damage for blunt dissection of brain tumor in neurosurgery simulation,” Computers in Biology and Medicine, Vol.120, Artilce No.103696, 2020.
- [13] B. Gonenc and H. Gurocak, “Virtual Tissue Cutting with Haptic Feedback Using a Hybrid Actuator with DC Servomotor and Magnetorheological Brake,” J. of Computing and Information Science in Engineering, Vol.16, No.3, Article No.030902, 2016.
- [14] M. Waga, Y. Aita, J. Noma, T. Kikuchi, and Y. Nonomura, “Scissors-Type Haptic Device Using Magnetorheological Fluid Containing Iron Nanoparticles,” Technologies, Vol.7, No.1, Article No.26, 2019.
- [15] A. M. Okamura, R. J. Webster, J. T. Nolin, K. W. Johnson, and H. Jafry, “The Haptic Scissors: Cutting in Virtual Environments,” Proc. of the 2003 IEEE Int. Conf. on Robotics and Automation, pp. 828-833, 2003.
- [16] V. B. Chial, M. Graphics, and A. M. Okamura, “On the Display of Haptic Recordings for Cutting Biological Tissues,” Proc. of the 10th Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, pp. 80-87, 2002.
- [17] M. Mahvash and A. M. Okamura, “A fracture mechanics approach to haptic synthesis of tissue cutting with scissors,” Proc. of the First Joint Eurohaptics Conf. and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, pp. 356-362, 2005.
- [18] K. Nagata and S. Kawamoto, “Fundamentals and technical standards in neurosurgery,” Chugai-Igakusha, 2005 (in Japanese).
- [19] K. Abe, Y. Tanida, A. Konno, and M. Uchiyama, “A Directional Deflection Sensor Beam for Very Small Force/Torque Measurement,” Proc. of the 2003 IEEE Int. Conf. on Intelligent Robots and Systems, Vol.2, pp. 1056-1061, 2003.
- [20] R. E. Stamper, L.-W. Tsai, and G. C. Walsh, “Optimization of a Three DOF Translational Platform for Well-Conditioned Workspace,” Proc. of the 1997 Int. Conf. on Robotics and Automation, pp. 3250-3255, 1997.
- [21] Y. Tsumaki, H. Naruse, D. Nenchev, and M. Uchiyama, “Design of a compact 6-DOF haptic interface,” Proc. of the 1998 IEEE Int. Conf. on Robotics and Automation, Vol.3, pp. 2580-2585, 1998.
- [22] M. Uchiyama, “Structures and characteristics of parallel manipulators,” Advanced Robotics, Vol.8, No.6, pp. 545-557, 1994.
- [23] B. Dasgupta and T. S. Mruthyunjaya, “Stewart platform manipulator: A review,” Mechanism and Machine Theory, Vol.35, No.1, pp. 15-40, 2000.
- [24] F. Pierrot, P. Dauchez, and A. Fournier, “HEXA: a fast six-DOF fully-parallel robot,” Proc. fo the Fifth Int. Conf. on Advanced Robotics ’Robots in Unstructured Environments, pp. 1158-1163, 1991.
- [25] Z. Yang and D. Zhang, “Novel Design of a 3-RRUU 6-DOF Parallel Manipulator,” IOP Conf. Series: Materials Science and Engineering, Vol.491, Article No.012006, 2019.
- [26] T. Harada and Y. Kunishige, “Singularity Free Mode Changes of a Redundantly Driven Two Limbs Six-Dof Parallel Robot,” Proc. of the 23rd CISM IFToMM Symposium on Robot Design, Dynamics and Control, pp. 405-413, 2020.
- [27] M. Vulliez, S. Zeghloul, and O. Khatib, “Design strategy and issues of the Delthaptic, a new 6-DOF parallel haptic device,” Mechanism and Machine Theory, Vol.128, pp. 395-411, 2018.
- [28] J. Arata, H. Kondo, M. Sakaguchi, and H. Fujimoto, “Development of Haptic Device ”DELTA-4” using Parallel Mechanism,” Proc. of the 2009 IEEE Int. Conf. on Robotics and Automation, pp. 294-300, 2009.
- [29] A. Tobergte, P. Helmer, U. Hagn, P. Rouiller, S. Thielmann, S. Grange, A. Albu-Schäffer, F. Conti, and G. Hirzinger, “The sigma.7 haptic interface for MiroSurge: A new bi-manual surgical console,” Proc. of the 2011 IEEE Int. Conf. on Intelligent Robots and Systems, pp. 3023-3030, 2011.
- [30] S. Fujino, D. Sato, K. Abe, A. Konno, and M. Uchiyama, “Displaying Feeling of Cutting by a Micro-Scissors Type Haptic Device,” Proc. of the 2008 IEEE Int. Conf. on Robotics and Automation, pp. 2067-2072, 2008.
- [31] D. Sato, R. Kobayashi, A. Kobayashi, S. Fujino, and M. Uchiyama, “Soft Tissue Pushing Operation Using a Haptic Interface for Simulation of Brain Tumor Resection,” J. Robot. Mechatron., Vol.18, No.5, pp. 634-642, 2006.
- [32] H. Courtecuisse, H. Jung, J. Allard, C. Duriez, D. Y. Lee, and S. Cotin, “GPU-based real-time soft tissue deformation with cutting and haptic feedback,” Progress in Biophysics and Molecular Biology, Vol.103, No.2-3, pp. 159-168, 2010.
- [33] W. Shi, P. X. Liu, and M. Zheng, “Cutting procedures with improved visual effects and haptic interaction for surgical simulation systems,” Computer Methods and Programs in Biomedicine, Vol.184, Artilce No.105270, 2020.
- [34] Y. C. Fung, “Biomechanics,” Springer, 2010.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.