Paper:
Development of Integrated Leader Controller for Forceps/Retractor Manipulation in Single-Port Water-Filled Laparo-Endoscopic Surgery
Kazuya Kawamura* and Yuma Shimura**
*Center for Frontier Medical Engineering, Chiba University
1-33 Yayoi-cho, Inage-ku, Chiba-shi, Chiba 263-8522, Japan
**Graduate School of Science and Engineering, Chiba University
1-33 Yayoi-cho, Inage-ku, Chiba-shi, Chiba 263-8522, Japan

Single-port water-filled laparo-endoscopic surgery (WaFLES) is a surgical procedure used for treatment in an environment filled with isotonic water in the abdominal cavity under a single-port condition. In this study, we developed two leader controllers for the forceps manipulator and retractor to generate and maintain a surgical workspace for a single-port WaFLES support robot. The development of the specific controller for each device increased the operation time and complicated the motion, such as regripping. We integrated the two functions as a controller to prevent the problem above. We performed grasping and retracting tasks in the virtual surgical workspace to evaluate the proposed controller. Based on the experimental results, we clarified the effect on the operation time by a different mechanism and observed that arranging the switch decreased the operation time. In addition, one of the proposed leader controllers improved operability in terms of operation time during selection and switching from the retractor to the forceps manipulator. However, the arrangement of the switch could adversely affect controller operability when switching from a simple operation (requiring only position control during retractor operation) to a complex operation (requiring both position and posture control during forceps operation). Furthermore, manipulation errors were observed using either of the proposed controllers. Therefore, the sensing procedure of the controller should be improved by addressing these errors in software and hardware.
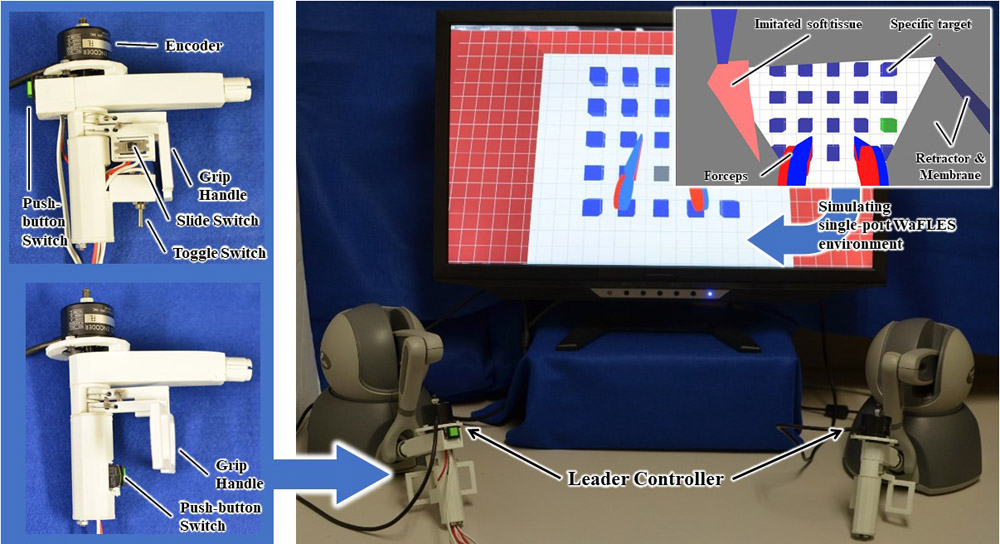
Leader controller for single-port WaFLES
- [1] T. Igarashi, Y. Shimomura, T. Yamaguchi, H. Kawahira, H. Makino, W. Yu, and Y. Naya, “Water-filled laparoendoscopic surgery (Wafles): feasibility study in porcine model,” J. of Laparoendoscopic and Advanced Surgical Techniques, Vol.22, No.1, pp. 70-75, doi: 10.1089/lap.2011.0404, 2012.
- [2] T. Igarashi, M. Teranuma, and T. Ishii, “Water-Filled Laparo-Endoscopic Surgery (WAFLES): A New Surgical System Performed Under Irrigation of Isotonic Water,” J. of Medical Imaging and Health Informatics, Vol.3, No.1, pp. 59-64, doi: 10.1166/jmihi.2013.1130, 2013.
- [3] T. Igarashi, T. Ishii, T. Aoe, W. Yu, Y. Ebihara, H. Kawahira, S. Isono, and Y. Naya, “Small-incision laparoscopy-assisted surgery under abdominal cavity irrigation in a porcine model,” J. of Laparoendoscopic and Advaced Surgical Techniques, Vol.26, No.2, pp. 122-128, doi: 10.1089/lap.2015.0461, 2016.
- [4] Y. Tanaka, S. Ogino, K. Kawamura, and T. Igarashi, “Sheath-shaped manipulator for surgical workspace creation in WaFLES,” Proc. of 2015 Int. Symp. on InfoComm & Media Technology in Bio-Medical & Healthcare Application, p. 81, 2015.
- [5] S. Ogino, Y. Tanaka, K. Kawamura, and T. Igarashi, “Development of Robotic Tool Holder with Power Transmission for Single Port WaFLES,” Proc. of 2015 Int. Symp. on InfoComm & Media Technology in Bio-Medical & Healthcare Application, p. 84, 2015.
- [6] T. Kato, T. Igarashi, and K. Kawamura, “Basic evaluation of tip mechanism of forceps manipulator in water environment for Single port WAFLES,” Proc. of 2017 Int. Symp. on InfoComm & Media Technology in Bio-medical & Healthcare Application, p. 71, Nanjing, China, December 13-16, 2017.
- [7] Y. Shimura and K. Kawamura, “Development of master manipulator for single-port WaFLES operating both forceps and surgical workspace creation,” J. of Japan Society of Computer Aided Surgery, Vol.19, No.4, pp. 269-297, 2017 (in Japanese).
- [8] E. Liu, M. Sekine, and K. Kawamura, “Development of balloon sensor system for surgical workspace creation in WaFLES,” Proc. of 2017 Int. Symp. on InfoComm & Media Technology in Bio-medical & Healthcare Application, p. 64, Nanjing, China, December 13-16, 2017.
- [9] A. Simorov, R. Otte, C. Kopietz, and D. Oleynikov, “Review of surgical robotics user interface: what is the best way to control robotic surgery?,” Surgical Endoscopy, Vol.26, pp. 2117-2125, doi: 10.1007/s00464-012-2182-y, 2012.
- [10] Y. Kamei, K. Harada, S. Tanaka, Y. Kurose, Y. Baek, S. Sora, A. Morita, N. Sugita, and M. Mitsuishi, “Development of Master Manipulator with High Usability for Microsurgical Robotic System,” Proc. of the 2013 JSME Conf. on Robotics and Mechatronics, Tuskuba, 2013 (in Japanese).
- [11] D. Zhang, Y. Guo, J. Chen, J. Liu, and G. Yang, “A Handheld Master Controller for Robot-Assisted Microsurgery,” 2019 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 394-400, doi: 10.1109/IROS40897.2019.8967774, 2019.
- [12] S. Abeywardena, E. Psomopoulou, M. Sani, A. Tzemanaki, and S. Dogramadzi, “Control of a da Vinci EndoWrist Surgical Instrument Using a Novel Master Controller,” IFMBE Proc. of Mediterranean Conf. on Medical and Biological Engineering and Computing (MEDICON 2019), pp. 1545-1550, 2019.
- [13] F. Zhong, P. Li, J. Shi, Z. Wang, J. Wu, J. Chan, N. Leung, I. Leung, M. Tong, and Y. Liu, “Foot-Controlled Robot-Enabled EnDOscope Manipulator (FREEDOM) for Sinus Surgery: Design, Control, and Evaluation,” IEEE Trans. on Biomedical Engineering, Vol.67, No.6, pp. 1530-1541, doi: 10.1109/TBME.2019.2939557, 2020.
- [14] T. Iwasa, R. Nakadate, S. Onogi, Y. Okamoto, J. Arata, S. Oguri, H. Ogino, E. Ihara, K. Ohuchida, T. Akahoshi, T. Ikeda, Y. Ogawa, and M. Hashizume, “A new robotic-assisted flexible endoscope with single-hand control: endoscopic submucosal dissection in the ex vivo porcine stomach,” Surgical Endoscopy, Vol.32, Issue 7, pp. 3386-3392, doi: 10.1007/s00464-018-6188-y, 2018.
- [15] Y. Cao, S. Miura, Y. Kobayashi, K. Kawamura, S. Sugano, and M. G. Fujie, “Pupil Variation Applied to the Eye Tracking Control of an Endoscopic Manipulator,” The IEEE Robotics and Automation Letters (RA-L), Vol.1, No.1, pp. 531-538, doi: 10.1109/LRA.2016.2521894, 2016.
- [16] Y. Cao, S. Miura, Q. Liu, Y. Kobayashi, K. Kawamura, S. Sugano, and M. G. Fujie, “Probabilistic neural network applied to eye tracking control to alter the direction of an endoscopic manipulator,” Mechanical Engineering J., Vol.4, No.4, doi: 10.1299/mej.15-00568, 2017.
- [17] I. Murasawa, S. Murofushi, C. Ishii, and H. Kawamura, “Development of a Robotic Laparoscope for Laparoscopic Surgery and its Control,” J. Robot. Mechatron., Vol.29, No.3, pp. 580-590, doi: 10.20965/jrm.2017.p0580, 2017.
- [18] S. Shim, T. Kang, D. Ji, H. Choi, S. Joung, and J. Hong, “An all-joint-control master device for single-port laparoscopic surgery robots,” Int. J. of Computer Assisted Radiology and Surgery, Vol.11, No.8, pp. 1547-1557, doi: 10.1007/s11548-016-1352-0, 2016.
- [19] L. Zorn, F. Nageotte, P. Zanne, A. Legner, B. Dallemagne, J. Marescaux, and M. Mathelin, “A Novel Telemanipulated Robotic Assistant for Surgical Endoscopy: Preclinical Application to ESD,” IEEE Trans. on Biomedical Engineering, Vol.65, No.4, pp. 797-808, doi: 10.1109/TBME.2017.2720739, 2018.
- [20] Y. Huang, W. Lai, L. Cao, J. Liu, X. Li, E. Burdet, and S. Phee, “A Three-Limb Teleoperated Robotic System with Foot Control for Flexible Endoscopic Surgery,” Annals of Biomedical Engineering, Vol.49, No.9, pp. 2282-2296, doi: 10.1007/s10439-021-02766-3A, 2021.
- [21] Y. Kobayashi, Y. Sekiguchi, T. Noguchi, Y. Takahashi, Q. Liu, S. Oguri, K. Toyoda, M. Uemura, S. Ieiri, M. Tomikawa, T. Ohdaira, M. Hashizume, and M. G. Fujie, “Development of a robotic system with six-degrees-of-freedom robotic tool manipulators for single-port surgery,” The Int. J. of Medical Robotics and Computer Assisted Surgery, Vol.11, Issue 2, pp. 235-246, doi: 10.1002/rcs.1600, 2015.
- [22] N. Hong, M. Kim, C. Lee, and S. Kim, “Head-mounted interface for intuitive vision control and continuous surgical operation in a surgical robot system,” Medical and Biological Engineering and Computing, Vol.57, pp. 601-614, doi: 10.1007/s11517-018-1902-4, 2019.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.